
Roboții asemănători câinilor reprezintă un domeniu major în robotică, iar inginerii de la Institutul Federal Elvețian de Tehnologie din Lausanne au reușit să inoveze. Robotul lor experimental continuă să se miște pe o bandă de alergare chiar și cu motoarele oprite - are nevoie doar de o contragreutate.
Proiectul a fost dezvoltat de studentul canadian la robotică Mickaël Achkar și s-a bazat pe date de captare a mișcării de la câini reali. Folosind analiza componentelor principale, datele au fost grupate în mai mulți vectori care descriu axele principale de mișcare ale câinelui, care au servit drept bază pentru proiectarea mecanismului.
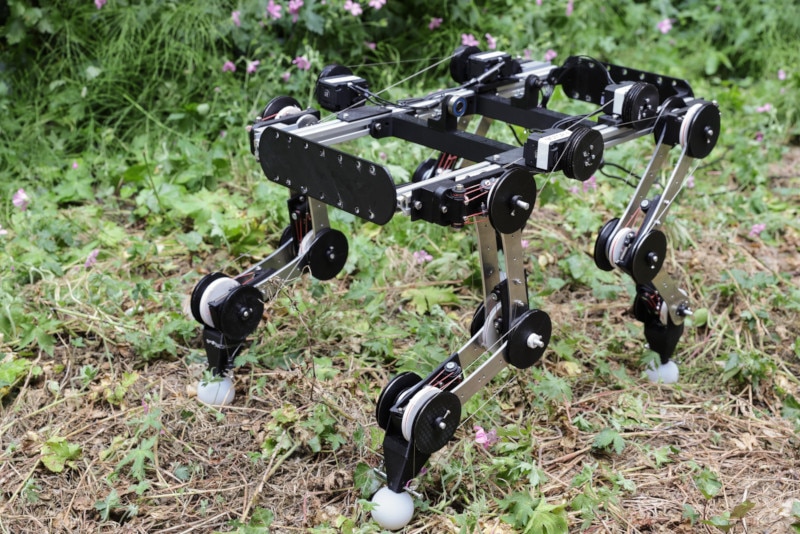
Designul robotului este simetric față de axa sa longitudinală. Oasele membrelor sunt înlocuite cu tije metalice, articulațiile cu blocuri de polimer imprimate 3D, iar tendoanele cu cabluri subțiri de oțel. Fiecare dintre cele patru picioare ale mașinii are trei articulații, ca ale unui câine adevărat, și fiecare este aliniată mecanic cu celelalte.
În timpul primului test al mașinii, participanții la proiect au avut parte de o surpriză: odată ce acționările robotului au fost activate, acesta a continuat să se miște independent, fără niciun sprijin motor. Singura componentă necesară pentru menținerea mișcării a fost banda de alergare. Robotul este echipat cu motoare care alimentează fiecare picior, dar aceste motoare pot fi oprite.
„La început, am crezut că este o întâmplare. Așa că am modificat ușor designul și am testat din nou robotul - și nu a mai putut funcționa”, a explicat creatorul proiectului. Pentru a menține mașina în mișcare, o contragreutate asemănătoare unui pendul a fost atașată în spatele acesteia pentru a-i susține mișcarea de rulare. Cu siguranță nu este o mașină în mișcare perpetuă: necesită un motor pentru a sări și a depăși obstacolele.
„Scopul nostru nu este să concurăm cu roboții de înaltă tehnologie, asemănători câinilor, ci mai degrabă să explorăm designuri robotice bazate pe prototipuri biologice. Aceasta implică rafinarea designului fundamental al robotului și modificarea proprietăților sale pasive, astfel încât să fie necesare doar sisteme de control simple - toate acestea maximizând în același timp capacitățile robotului. Ceea ce am făcut aici - proiectarea articulațiilor care să funcționeze împreună - și-a dovedit deja utilitatea pentru crearea de brațe robotice și alte părți ale corpului”, a concluzionat Mikael Ashkar.


