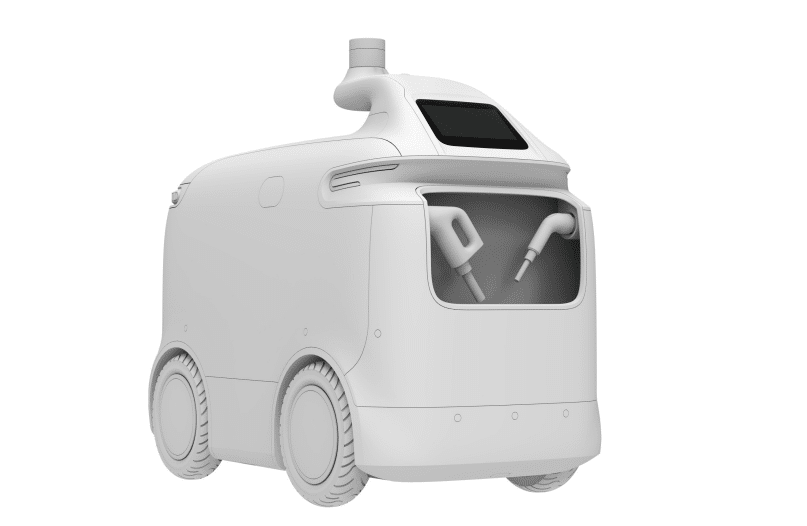
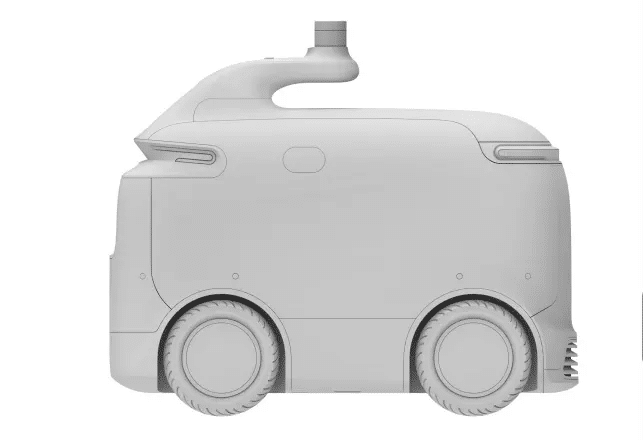
Compania a depus un brevet pentru o de încărcare pentru vehicule electrice. Dispozitivul amintește oarecum de robotul de livrare de la Yandex și probabil va fi și autonom.
Designul descris în aplicație include două pistoale de încărcare DC și AC, precum și un număr mare de senzori, un lidar și un ecran de interfață cu utilizatorul. Aceasta este o soluție bună pentru regiunile în care infrastructura nu ține pasul cu cererea de vehicule electrice.
La Japan Mobility Show, companiile de tehnologie au prezentat o gamă uimitoare de gadgeturi, aeronave, roboți și alte tehnologii.
O invenție a atras atenția oaspeților în mod special: un robot de mers cu patru picioare, capabil să transporte până la patru pasageri.
SR-02, un prototip creat de producătorul japonez Sansei Technologies, seamănă cu o combinație între AT-AT din Războiul Stelelor și un rinocer. A fost conceput pentru atracțiile din parcuri de distracții.
Robotul a fost dezvăluit pentru prima dată în februarie anul trecut, Sansei declarând că dezvoltarea va oferi „o experiență complet nouă de mișcare dinamică în timpul mersului pe patru picioare”.
Prototipul are puțin peste 3 metri lungime și 1,5 metri lățime. Robotul poate fi controlat atât de la distanță, cât și direct de către un operator din cabină.
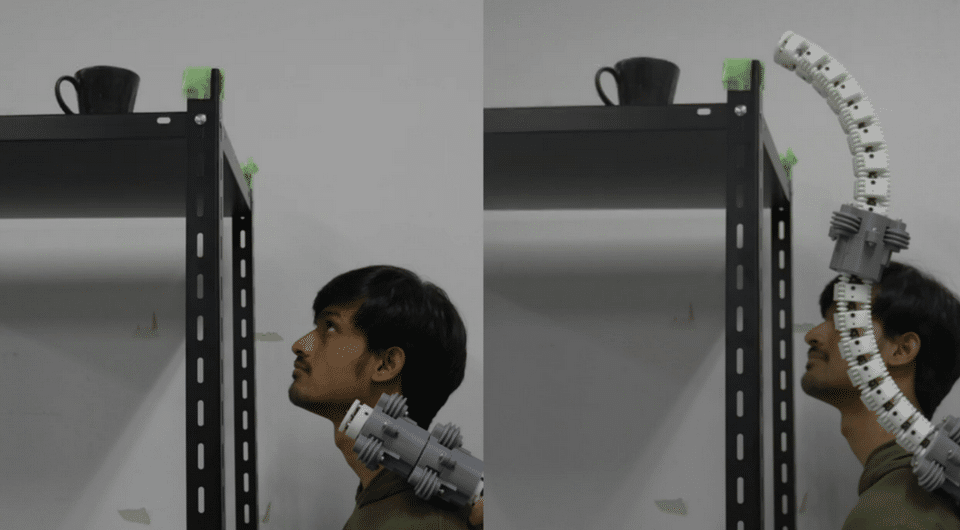
Ingineri din Japonia și Marea Britanie au dezvoltat un prototip de braț robotic flexibil cu lungime variabilă. Folosind un mecanism cu cremalieră și melc, brațul robotic se poate extinde până la o lungime maximă de 450 de milimetri și se poate îndoi până la o rază minimă de 125 de milimetri. Articolul a fost publicat în IEEE Robotics and Automation Letters.
Unul dintre principalele avantaje ale brațelor robotice în formă de tentacule este flexibilitatea și agilitatea lor. Aceste proprietăți permit brațelor robotice să ajungă în locuri greu accesibile, ceea ce le face promițătoare pentru aplicații precum chirurgia. De obicei, acestea sunt fabricate din materiale moi și flexibile, dar există și versiuni rigide. De exemplu, structura unui manipulator dezvoltat de inginerii britanici constă din „vertebre” imprimate 3D alternante, care formează o structură capabilă să se îndoaie în ambele direcții. Cu toate acestea, acest braț robotic și multe altele similare au o limitare: pot funcționa eficient doar într-o anumită zonă apropiată de ele, din cauza incapacității lor de a-și varia lungimea.
Inginerii conduși de Motoji Yamamoto de la Universitatea Kyushu din Japonia au dezvoltat un design de braț robotic care depășește acest dezavantaj. Aceștia au fost inspirați de structura neobișnuită a limbii ciocănitorii. Osul hioid, flexibil și mobil, este lung, permițându-i să se înfășoare în jurul craniului și să se miște prin alunecare de-a lungul acestuia. Acest lucru permite limbii păsării să se extindă de trei ori mai mult decât ciocul atunci când caută hrană sub scoarța copacilor.
Manipulatorul este alcătuit dintr-un modul motor cu trei motoare electrice, pe axele cărora se află viermi, și un tentacul flexibil, similar ca design cu o coloană vertebrală, format dintr-un set de „vertebre” - discuri distanțate uniform, cu trei fante semicirculare situate pe partea exterioară la 120 de grade, prin care trec tije dințate flexibile.
Tentaculul este poziționat în orificiul central al modulului motorului, astfel încât trei angrenaje melcate de pe arborii motoarelor electrice de control se angajează cu tijele dințate, formând o transmisie cu cremalieră și pinion. Când toate cele trei motoare se rotesc cu aceeași viteză, tentaculul se mișcă înainte sau înapoi prin modulul motorului. Dacă se rotește doar un motor, direcția de rotație a acestuia face ca tentaculul să se devieze într-o direcție sau alta într-unul dintre planuri. Folosind toate cele trei transmisii cu cremalieră și pinion, manipulatorul se poate îndoi în toate cele trei direcții.
Prototipul se poate extinde până la 450 de milimetri și se poate îndoi cu o rază minimă de 125 de milimetri. Acest lucru permite plierea compactă a tijei tentaculelor atunci când este retrasă, de exemplu, într-un container, reducând la minimum cerințele de spațiu. Unități de măsură inerțiale (IMU) poziționate în mai multe puncte de-a lungul axei manipulatorului sunt utilizate pentru a urmări poziția și forma curentă a acestuia. Informațiile primite de la aceste unități sunt, de asemenea, utilizate pentru a determina direcția și magnitudinea forțelor externe care acționează asupra capătului manipulatorului folosind un algoritm de regresie a procesului gaussian.
O direcție viitoare de lucru, potrivit inginerilor, va fi combinarea mai multor module motorii pe o singură „coloană vertebrală”. Aceasta va crește gradele de libertate ale manipulatorului, permițând o flexie mai mare.
Spre deosebire de cel prezentat mai sus, manipulatorul MASR, creat de inginerii israelieni, are o parte externă, nu internă, care se mișcă. Acesta constă dintr-o unitate mobilă cu trei motoare care se mișcă de-a lungul unui set de legături pasive ale manipulatorului, ca și cum ar fi pe șine, rotind fiecare legătură în unghiul dorit.
Într-o fabrică de distribuție agricolă din Coreea de Sud, un robot a prins din greșeală un angajat de o bandă transportoare. Bărbatul a murit din cauza rănilor suferite, relatează Sky News.
Un specialist de la o companie de robotică (nume reținut) a sosit la centrul de distribuție pentru a verifica senzorii robotului înainte de o rulare de probă. Robotul urma să stivuiască cutii cu legume pe paleți.
Potrivit poliției din provincia Gyeongsangnam-do, unde a avut loc incidentul, robotul l-a confundat pe tehnician cu o ladă și l-a fixat pe o bandă transportoare „fără nicio șansă de scăpare, zdrobindu-i fața și pieptul”. Victima a fost imediat spitalizată. Cu toate acestea, a murit din cauza rănilor suferite.
Forțele de ordine vor evalua acțiunile personalului de siguranță al centrului de distribuție. Lucrătorilor responsabili de incident li se pot aduce acuzații penale pentru neglijență. Compania care deține fabrica a solicitat dezvoltatorilor să îmbunătățească sistemul pentru a se asigura că acesta nu reprezintă o amenințare la adresa vieții umane.
Robotul mamograf va palpa sânul pentru a depista noduli și apoi va folosi toate celelalte tehnici de diagnostic, inclusiv ecografia. Aceasta implică, în esență, instalarea unui mini-aparat cu ultrasunete complet echipat pe sânul femeii.
Este absolut sigur pentru ea; ecografia este complet nedureroasă și nu necesită nicio pregătire specială.
Folosind dispozitivul, robotul determină starea organismului și îi permite să prescrie tratamentul necesar în funcție de simptomele bolii.
Startup-ul japonez Tsubame Industries a început să accepte precomenzi pentru un robot masiv care arată ca și cum ar fi ieșit direct din franciza Gundam.
Robotul Archax, numit după Archaeopteryx, care a dispărut acum aproximativ 150 de milioane de ani, are o înălțime de 4,5 metri, cântărește 3,5 tone și este controlat din interior. Un operator uman este cazat într-o cabină cu aer condiționat, dotată cu patru monitoare pentru evaluarea mediului înconjurător.
Una dintre cele mai impresionante caracteristici ale robotului este capacitatea sa de a se deplasa atât în poziție verticală, cât și în modul vehicul. În modul vehicul, robotul se coboară mai aproape de sol și se poate deplasa cu viteze de aproximativ 10 km/h.
Ryo Yoshida, directorul executiv în vârstă de 25 de ani al companiei Tsubame Industries, a declarat că dorește să combine unele dintre elementele pentru care Japonia este renumită - animație, jocuri, roboți și mașini - într-unul singur.
«Am vrut să creez ceva care să spună: „Aceasta este Japonia”«
Se așteaptă ca fiecare robot să coste aproximativ 2,7 milioane de dolari. Startup-ul intenționează să construiască și să vândă cinci dintre aceste mașini. Compania promite să înceapă livrările în decurs de un an.
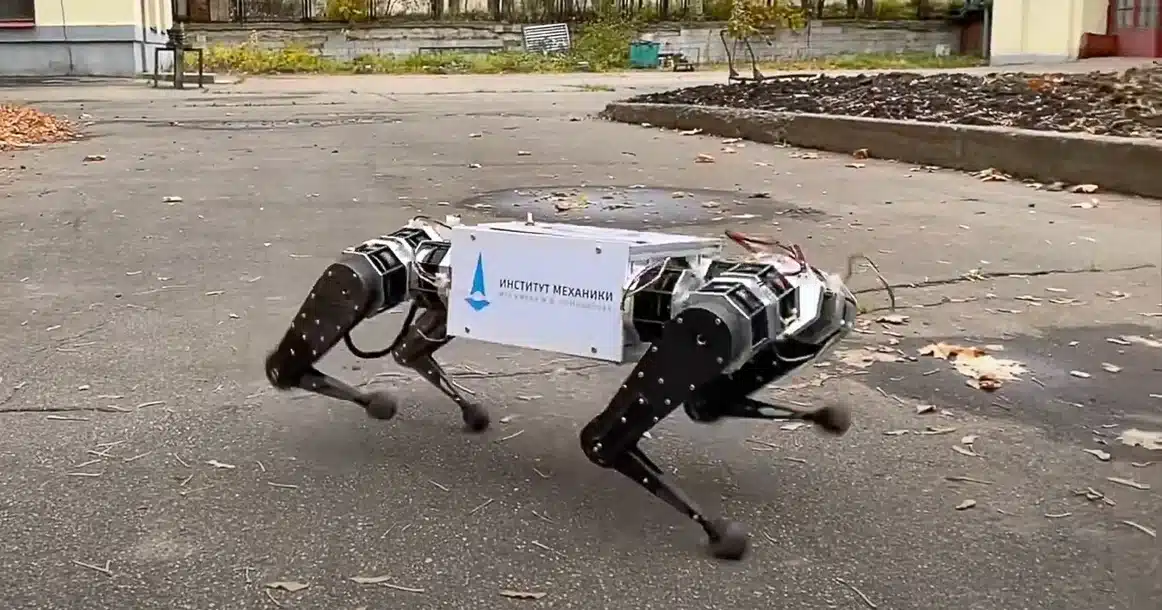
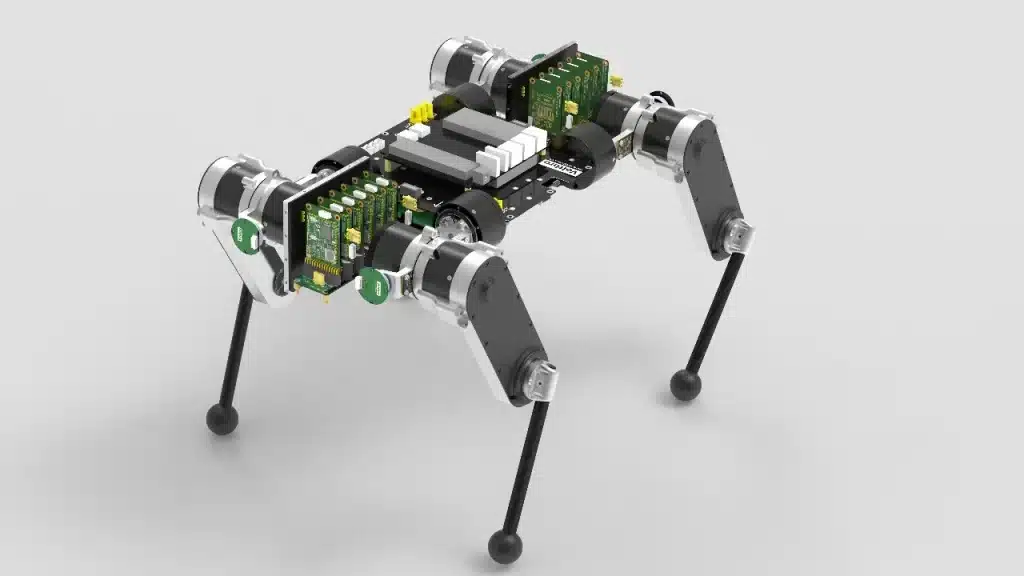
A doua versiune a câinelui robot rusesc a primit un corp nou, un sistem de control îmbunătățit și alte inovații.
O versiune domestică a robotului patruped Spot, produs de Boston Dynamics, a fost creată de inginerii de la Institutul de Mecanică al Universității de Stat din Moscova și de proiectul Volt Brothers. Noul robot este succesorul primei versiuni a câinelui robotic, dezvăluită în 2021.
Robopes 1.0 a fost primul robot din Rusia creat folosind motoare fără perii cu rapoarte de reducere mici. Noua sa versiune este destinată grupurilor de cercetare care dezvoltă robotică modernă pentru mers, potrivit serviciului de presă al Universității de Stat din Moscova. De asemenea, este potrivit pentru predarea școlarilor și studenților.
Ce este nou
În ultimii doi ani, specialiștii au reproiectat corpul robotului. Factorul său de formă a fost modificat, facilitând lucrul cu câinele robotic pe o masă. De asemenea, este mai ușor să conectați echipamente suplimentare la acesta.
„Am făcut ca noua versiune a robotului să fie cât mai deschisă posibil dezvoltării, în ceea ce privește software-ul la toate nivelurile, lucru cu care niciun alt robot nu se poate lăuda”, comentează Anton Rogachev, inginer de frunte la Institutul de Mecanică al Universității de Stat din Moscova.
Robotul este controlat de Sistemul de Operare al Robotului. Acesta poate fi îmbunătățit prin adăugarea de noi senzori, inclusiv lidar și camere de adâncime. Acești senzori vor permite robotului să recunoască pereții și obstacolele.
O altă caracteristică nouă sunt comenzile îmbunătățite. Chiar și un joystick este suficient. Mersul implicit al robotului este trapul, alergând cu 3,5 km/h. Robotul poate da mâna, se poate întinde și se poate ridica din orice poziție. Durata de viață a bateriei este de până la 60 de minute.
Mai multe detalii despre dezvoltare și o demonstrație live a robotului sunt planificate pentru 7 octombrie, la ora 12:30, ora Moscovei, la Expocentre-ul de pe Krasnaya Presnya (Moscova).
În orașul Kumamoto din sud-vestul Japoniei, roboții vor participa la cursuri în locul elevilor, relatează ziarul Mainichi Shimbun. Aceasta este o încercare a consiliului local de învățământ de a combate absenteismul.
În esență, androizii vor acționa ca avatare ale elevilor, permițându-le să participe la cursuri de la distanță. Roboții sunt echipați cu microfoane, difuzoare și camere pentru feedback. Au aproximativ un metru înălțime. Tabletele montate pe pieptul roboților pot fi controlate de acasă. Copiii vor putea participa la discuții cu colegii și profesorii lor.
Potrivit publicației The Guardian, roboții se vor deplasa și prin școală și vor „participa” la diverse activități.
Proiectul este programat să fie lansat în noiembrie, rezultatele urmând să fie evaluate în martie. Scopul este de a reduce anxietatea elevilor care intenționează să se întoarcă la cursuri. Bugetul suplimentar pentru anul fiscal 2023 a inclus deja aproximativ 10.550 de dolari (aproximativ 1 milion de ruble) pentru proiect. Proiectul prevede crearea a doi roboți.
Măsurile au fost luate din cauza unei creșteri a absenteismului. Acestea sunt probabil legate de pandemia de coronavirus, potrivit The Guardian. În anul școlar 2018, au fost 1.283 de absențe, în timp ce în anul școlar 2022, 2.760 de elevi au absentat.
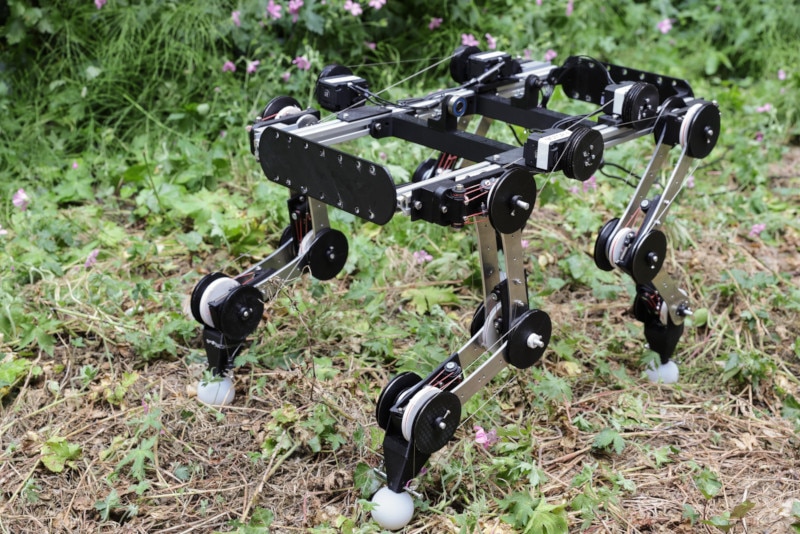
Roboții asemănători câinilor reprezintă un domeniu major în robotică, iar inginerii de la Institutul Federal Elvețian de Tehnologie din Lausanne au reușit să inoveze. Robotul lor experimental continuă să se miște pe o bandă de alergare chiar și cu motoarele oprite - are nevoie doar de o contragreutate.
Proiectul a fost dezvoltat de studentul canadian la robotică Mickaël Achkar și s-a bazat pe date de captare a mișcării de la câini reali. Folosind analiza componentelor principale, datele au fost grupate în mai mulți vectori care descriu axele principale de mișcare ale câinelui, care au servit drept bază pentru proiectarea mecanismului.
Designul robotului este simetric față de axa sa longitudinală. Oasele membrelor sunt înlocuite cu tije metalice, articulațiile cu blocuri de polimer imprimate 3D, iar tendoanele cu cabluri subțiri de oțel. Fiecare dintre cele patru picioare ale mașinii are trei articulații, ca ale unui câine adevărat, și fiecare este aliniată mecanic cu celelalte.
În timpul primului test al mașinii, participanții la proiect au avut parte de o surpriză: odată ce acționările robotului au fost activate, acesta a continuat să se miște independent, fără niciun sprijin motor. Singura componentă necesară pentru menținerea mișcării a fost banda de alergare. Robotul este echipat cu motoare care alimentează fiecare picior, dar aceste motoare pot fi oprite.
„La început, am crezut că este o întâmplare. Așa că am modificat ușor designul și am testat din nou robotul - și nu a mai putut funcționa”, a explicat creatorul proiectului. Pentru a menține mașina în mișcare, o contragreutate asemănătoare unui pendul a fost atașată în spatele acesteia pentru a-i susține mișcarea de rulare. Cu siguranță nu este o mașină în mișcare perpetuă: necesită un motor pentru a sări și a depăși obstacolele.
„Scopul nostru nu este să concurăm cu roboții de înaltă tehnologie, asemănători câinilor, ci mai degrabă să explorăm designuri robotice bazate pe prototipuri biologice. Aceasta implică rafinarea designului fundamental al robotului și modificarea proprietăților sale pasive, astfel încât să fie necesare doar sisteme de control simple - toate acestea maximizând în același timp capacitățile robotului. Ceea ce am făcut aici - proiectarea articulațiilor care să funcționeze împreună - și-a dovedit deja utilitatea pentru crearea de brațe robotice și alte părți ale corpului”, a concluzionat Mikael Ashkar.
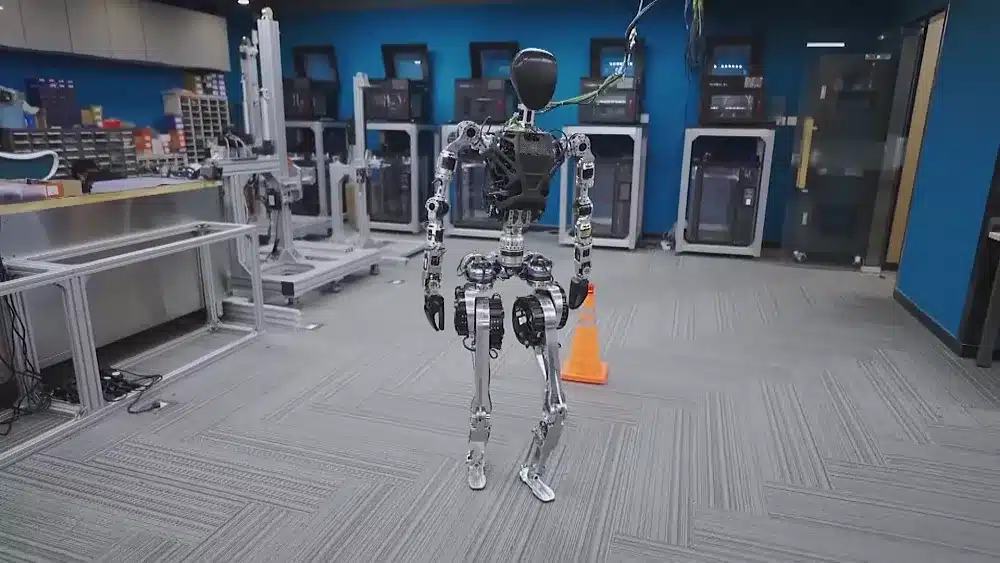
Startup-ul chinezesc Fourier Intelligence intenționează să lanseze mii de roboți umanoizi GR-1 până în 2024. Fondatorul companiei, Alex Gu, consideră că astfel de dispozitive vor deveni o parte integrantă a vieții de zi cu zi a oamenilor în viitor.
Într-un interviu acordat publicației South China Morning Post, Gu a declarat că Fourier Intelligence intenționează să înceapă producția în masă de roboți umanoizi și să livreze „mii de unități” încă din 2024.
Compania chineză intenționează să se concentreze pe dezvoltarea hardware-ului care alcătuiește „corpurile” roboților, lăsând dezvoltarea „creierului” androizilor dezvoltatorilor de inteligență artificială. Cofondatorul și directorul de strategie al lui Fourier, Zeng, a raportat că startup-ul poartă discuții cu mai multe companii din domeniul LLM despre potențiale colaborări.
Potrivit lui Gu, roboții umanoizi ar putea fi utilizați în îngrijirea persoanelor în vârstă, educație și industria ospitalității. Omul de afaceri consideră că aceștia vor genera mai multe venituri pentru compania sa în următorii trei până la cinci ani decât roboții de reabilitare produși în prezent de Fourier.
Potrivit directorului startup-ului, roboții umanoizi pot deveni o parte integrantă a vieții de zi cu zi a oamenilor, dar acest lucru va dura mult timp.
„Nu vă așteptați la o minune peste un an sau cam așa ceva, nici măcar de la Tesla - cu toții trebuie să așteptăm [producția în masă de roboți umanoizi]”, a spus Gu. „Dar nu subestimați nici posibilitatea ca acest lucru să devină parte din viața de zi cu zi a oamenilor în cinci sau zece ani.”.
Anul trecut, CEO-ul Tesla, Elon Musk, a anunțat un calendar pentru lansarea producției în masă de roboți umanoizi în fabricile producătorului de mașini electrice. Miliardarul a promis că producția de androizi Optimus va începe la sfârșitul anului 2023.
Fourier Intelligence a fost fondată în 2015 și inițial s-a concentrat pe dezvoltarea de roboți de reabilitare. Compania furnizează dispozitive instituțiilor medicale din peste 10 țări.
În iulie 2023, startup-ul a dezvăluit robotul umanoid GR-1: androidul este capabil să meargă pe două picioare cu o viteză de 5 km/h și să transporte încărcături de până la 50 kg.