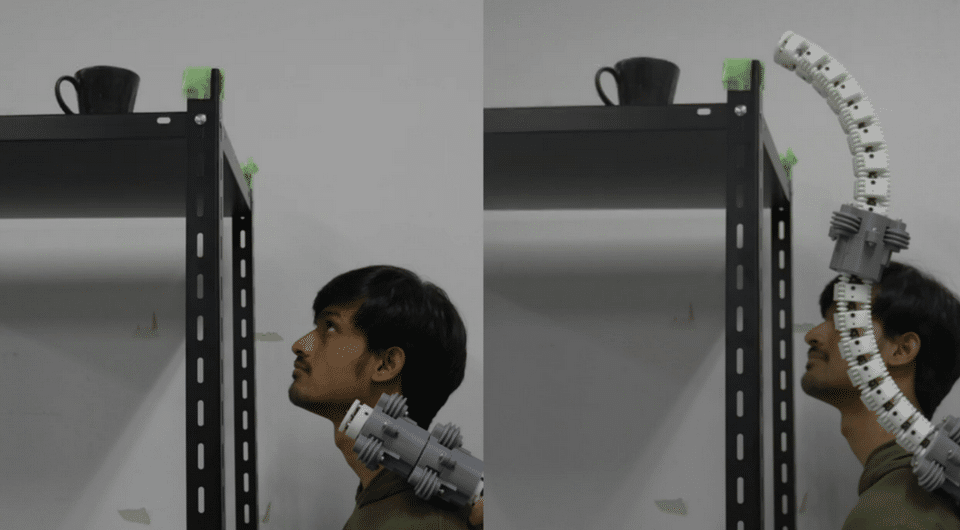
Инженеры из Японии и Британии разработали прототип гибкого роботизированного манипулятора с изменяемой длиной. С помощью червячно-реечного механизма робощупальце может выдвигаться на максимальную длину до 450 миллиметров и сгибаться с минимальным радиусом 125 миллиметров. Статья опубликована в журнале IEEE Robotics and Automation Letters.
Одно из главных преимуществ выполненных в виде щупалец манипуляторов для роботов заключается в их гибкости и подвижности. За счет этих свойств, робощупальца могут проникать в труднодоступные места, что делает их перспективными, например, для применения в хирургии. Для их создания обычно используются мягкие и эластичные материалы, но существуют и варианты из жестких материалов. Например, структура манипулятора, разработанного британскими инженерами, состоит из чередующихся 3D-печатных «позвонков», которые образуют конструкцию, способную изгибаться в двух направлениях. Однако и этот и множество ему подобных роботизированных манипуляторов имеют ограничение — они могут эффективно действовать лишь в некоторой ближайшей к ним области из-за неспособности менять свою длину.
Инженеры под руководством Мотоджи Ямамото (Motoji Yamamoto) из Университета Кюсю в Японии разработали конструкцию робоманипулятора, лишенную этого недостатка. Они вдохновились необычным устройством языка дятлов, гибкая подвижная подъязычная кость которых имеет большую длину, из-за чего она оборачивается вокруг черепа и при этом может двигаться, скользя по нему. Благодаря этому язык птицы в поисках еды под корой деревьев может выдвигаться на расстояние, превышающее длину клюва в три раза.

Манипулятор состоит из моторного модуля с тремя электродвигателями, на валах которых располагаются червяки, и гибкого щупальца, похожего конструкцией на позвоночник, состоящий из набора равномерно отстоящих друг от друга «позвонков» — дисков, с расположенными на внешней части через 120 градусов тремя полукруглыми прорезями, сквозь которые проходят гибкие зубчатые стержни.
При этом щупальце располагается в центральном отверстии моторного модуля таким образом, что три червяка на валах управляющих электромоторов, входят в зацепление с зубчатыми стержнями, образуя своеобразную зубчато-реечную передачу. При вращении всех трех моторов с одинаковой скоростью щупальце двигается вперед или назад сквозь моторный модуль. В случае, если вращается только один из моторов, то в зависимости от направления его вращения происходит отклонение щупальца в ту или иную сторону в одной из плоскостей. А с помощью всех трех червячно-реечных передач достигаются изгибы манипулятора во всех трех направлениях.
Созданный прототип способен выдвигаться на длину 450 миллиметров и изгибаться с минимальным радиусом 125 миллиметров. Благодаря этому в убранном состоянии ствол щупальца может компактно сворачиваться, например, в контейнере, чтобы не занимать много места. Чтобы отслеживать текущее положение и форму манипулятора используются расположенные вдоль его оси в нескольких точках инерциальные измерительные модули (IMU). Поступающая от них информация также используется для определения с помощью алгоритма регрессии на основе гауссовских процессов направления и величины воздействующих на конец манипулятора внешних сил.
Одним из будущих направлений работы, по словам инженеров, станет совмещение нескольких моторных модулей на одном «позвоночнике». Это позволит увеличить число степеней свободы манипулятора за счет большего количества изгибов.
В манипуляторе MASR, созданном израильскими инженерами, в отличие от представленного выше наоборот подвижна не внутренняя часть, а внешняя. Он состоит из подвижного блока с тремя моторами, который как по рельсам передвигается по набору пассивных звеньев манипулятора, поворачивая каждое звено на нужный ему угол.