
Ingineri din Japonia și Marea Britanie au dezvoltat un prototip de braț robotic flexibil cu lungime variabilă. Folosind un mecanism cu cremalieră și melc, brațul robotic se poate extinde până la o lungime maximă de 450 de milimetri și se poate îndoi până la o rază minimă de 125 de milimetri. Articolul a fost publicat în IEEE Robotics and Automation Letters.
Unul dintre principalele avantaje ale brațelor robotice în formă de tentacule este flexibilitatea și agilitatea lor. Aceste proprietăți permit brațelor robotice să ajungă în locuri greu accesibile, ceea ce le face promițătoare pentru aplicații precum chirurgia. De obicei, acestea sunt fabricate din materiale moi și flexibile, dar există și versiuni rigide. De exemplu, structura unui manipulator dezvoltat de inginerii britanici constă din „vertebre” imprimate 3D alternante, care formează o structură capabilă să se îndoaie în ambele direcții. Cu toate acestea, acest braț robotic și multe altele similare au o limitare: pot funcționa eficient doar într-o anumită zonă apropiată de ele, din cauza incapacității lor de a-și varia lungimea.
Inginerii conduși de Motoji Yamamoto de la Universitatea Kyushu din Japonia au dezvoltat un design de braț robotic care depășește acest dezavantaj. Aceștia au fost inspirați de structura neobișnuită a limbii ciocănitorii. Osul hioid, flexibil și mobil, este lung, permițându-i să se înfășoare în jurul craniului și să se miște prin alunecare de-a lungul acestuia. Acest lucru permite limbii păsării să se extindă de trei ori mai mult decât ciocul atunci când caută hrană sub scoarța copacilor.

Manipulatorul este alcătuit dintr-un modul motor cu trei motoare electrice, pe axele cărora se află viermi, și un tentacul flexibil, similar ca design cu o coloană vertebrală, format dintr-un set de „vertebre” - discuri distanțate uniform, cu trei fante semicirculare situate pe partea exterioară la 120 de grade, prin care trec tije dințate flexibile.
Tentaculul este poziționat în orificiul central al modulului motorului, astfel încât trei angrenaje melcate de pe arborii motoarelor electrice de control se angajează cu tijele dințate, formând o transmisie cu cremalieră și pinion. Când toate cele trei motoare se rotesc cu aceeași viteză, tentaculul se mișcă înainte sau înapoi prin modulul motorului. Dacă se rotește doar un motor, direcția de rotație a acestuia face ca tentaculul să se devieze într-o direcție sau alta într-unul dintre planuri. Folosind toate cele trei transmisii cu cremalieră și pinion, manipulatorul se poate îndoi în toate cele trei direcții.
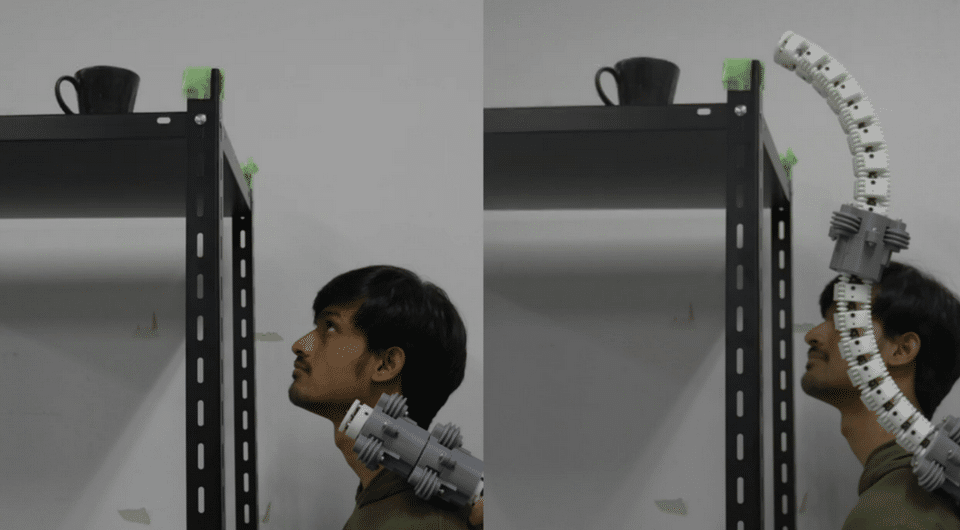
Prototipul se poate extinde până la 450 de milimetri și se poate îndoi cu o rază minimă de 125 de milimetri. Acest lucru permite plierea compactă a tijei tentaculelor atunci când este retrasă, de exemplu, într-un container, reducând la minimum cerințele de spațiu. Unități de măsură inerțiale (IMU) poziționate în mai multe puncte de-a lungul axei manipulatorului sunt utilizate pentru a urmări poziția și forma curentă a acestuia. Informațiile primite de la aceste unități sunt, de asemenea, utilizate pentru a determina direcția și magnitudinea forțelor externe care acționează asupra capătului manipulatorului folosind un algoritm de regresie a procesului gaussian.
O direcție viitoare de lucru, potrivit inginerilor, va fi combinarea mai multor module motorii pe o singură „coloană vertebrală”. Aceasta va crește gradele de libertate ale manipulatorului, permițând o flexie mai mare.
Spre deosebire de cel prezentat mai sus, manipulatorul MASR, creat de inginerii israelieni, are o parte externă, nu internă, care se mișcă. Acesta constă dintr-o unitate mobilă cu trei motoare care se mișcă de-a lungul unui set de legături pasive ale manipulatorului, ca și cum ar fi pe șine, rotind fiecare legătură în unghiul dorit.


