Agility Robotics заманауи жасанды интеллектпен жабдықталған роботтың қалай жұмыс істейтінін көрсетті. Алдыңғыларынан айырмашылығы, ол «Дарт Вейдердің жарық қылышының түсіндегі қорапты алып, оны алдыңғы қатардағы ең биік мұнараға қойыңыз» сияқты табиғи тілдегі командаларды түсінеді.
Әдетте, роботтардың таңғажайып ерліктер жасайтын бейнелері бағдарламаланған мінез-құлыққа негізделген. Сынақ және қателік арқылы адамдар роботтарды әртүрлі жағдайларда белгілі бір әрекеттерді орындау үшін бағдарламалайды, ал нәтижелері сырттан қарағанда тек автономды әрекеттер болып көрінеді. Ептілік робототехникасы басқаша, себебі робот бағдарламаланбаған; ол өзіне берілген командаларды табиғи тілде түсінеді және орындайды.
Сынақ үшін әртүрлі биіктіктегі нөмірленген мұнаралар мен әртүрлі сипаттамалары бар үш қораптан тұратын қоймаға ұқсайтын ғимарат салынды. Робот қоршаған ортаны талдады, бірақ әрекеттерге арналған бағдарламаланған нұсқаулар алмады. Машинаның «ойлау» процесі келесідей болды: «Тапсырманы орындау үшін қандай командаларды қолдана алатынымды анықтауым керек», «Дарт Вейдердің жарық қылышы қызыл, сондықтан мен қызыл қорапты алуым керек», «Алдыңғы қатардағы ең биік мұнара - №4 мұнара», «Алдымен мен қызыл қорапты аламын, содан кейін №4 мұнараға өтемін», «Мен №4 мұнарадамын, сондықтан мен қызыл қорапты үстіне қоюым керек» және т.б.
Agility Robotics компаниясы өзінің көрсетілімінің қазіргі заманғы жасанды интеллекттің роботтарды шынымен пайдалы ете алатынын көрсетуге бағытталғанын атап өтті. Қазіргі уақытта компания АҚШ-та жылына 10 000 гуманоидты робот шығаратын зауыт салуда. Олардың кейбіреулері Amazon қоймаларына орналастырылады.
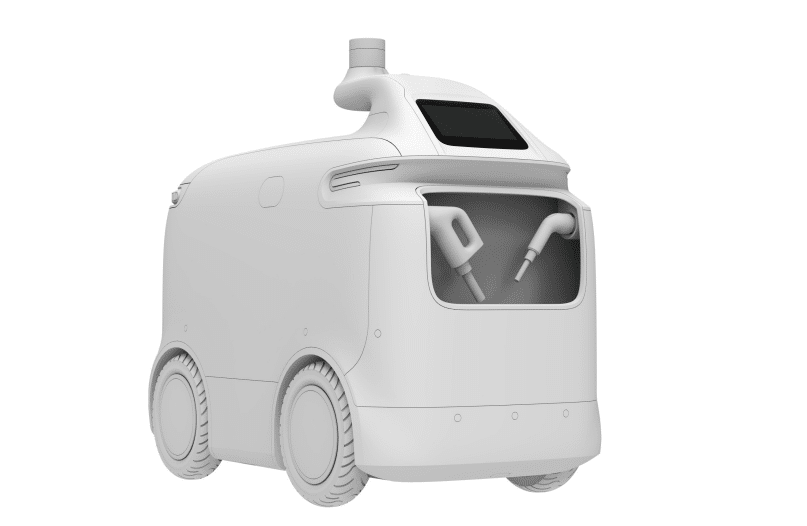
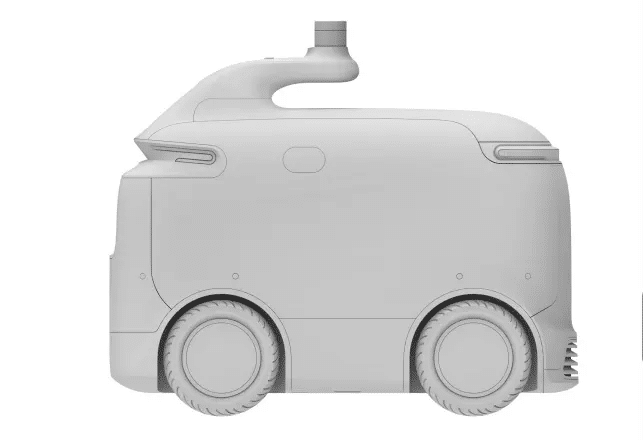
Компания электромобильдерге арналған мобильді зарядтау . Құрылғы Яндекстің жеткізу роботын еске түсіреді және автономды болуы да мүмкін.
Қолданбада сипатталған дизайн екі тұрақты және айнымалы ток зарядтау тапаншасын, сондай-ақ көптеген сенсорларды, лидар мен пайдаланушы интерфейсі экранын қамтиды. Бұл инфрақұрылым электромобильдерге деген сұранысты қанағаттандыра алмайтын аймақтар үшін жақсы шешім.
Жапониядағы мобильділік көрмесінде технологиялық компаниялар гаджеттердің, ұшақтардың, роботтардың және басқа да технологиялардың таңғажайып жиынтығын көрсетті.
Әсіресе, бір өнертабыс қонақтардың назарын аударды: төрт жолаушыға дейін тасымалдай алатын төрт аяқты жүретін робот.
Жапондық Sansei Technologies өндірушісі жасаған SR-02 прототипі «Жұлдызды соғыстар» фильміндегі AT-AT жүргіші мен мүйізтұмсықтың қоспасына ұқсайды . Ол ойын-сауық саябақтарындағы аттракциондарға арналған.
Робот алғаш рет өткен жылдың ақпан айында таныстырылды, Сансей бұл әзірлеме «төрт аяқпен жүру кезінде динамикалық қозғалыстың мүлдем жаңа тәжірибесін» қамтамасыз ететінін мәлімдеді.
Прототиптің ұзындығы 3 метрден сәл астам, ал ені 1,5 метр. Роботты кабинадағы оператор қашықтан да, тікелей де басқара алады.
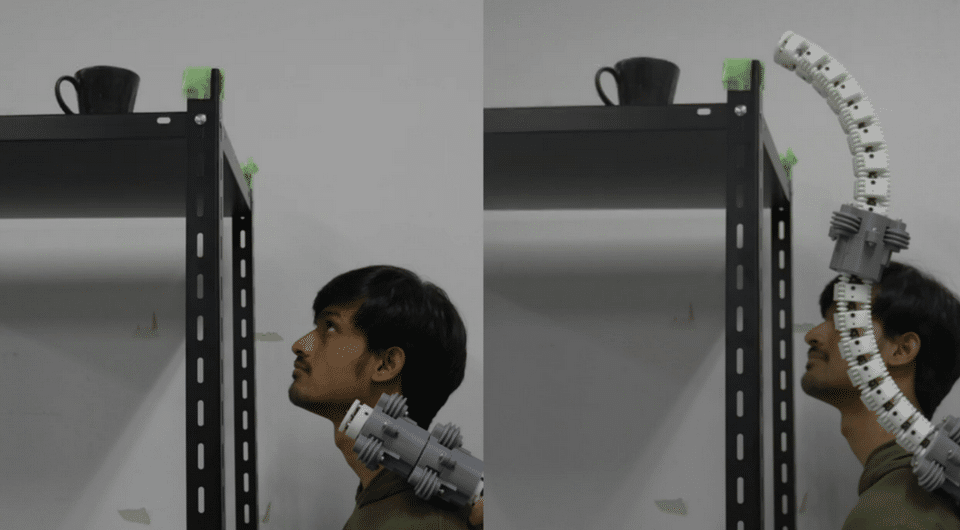
Жапония мен Ұлыбритания инженерлері ұзындығы өзгермелі икемді робот қолының прототипін жасап шығарды. Тірек және құрт механизмін пайдаланып, робот қолы максималды ұзындығы 450 миллиметрге дейін созылып, минималды радиусы 125 миллиметрге дейін бүгілуі мүмкін. Мақала IEEE Robotics and Automation Letters журналында жарияланды.
Шатыр тәрізді робот қолдарының негізгі артықшылықтарының бірі - олардың икемділігі мен ептілігі. Бұл қасиеттер робот қолдарының жетуі қиын жерлерге жетуіне мүмкіндік береді, бұл оларды хирургия сияқты қолданбалар үшін перспективалы етеді. Олар әдетте жұмсақ және икемді материалдардан жасалған, бірақ қатты нұсқалары да бар. Мысалы, британдық инженерлер әзірлеген манипулятордың құрылымы екі бағытта да иілуге қабілетті құрылымды құрайтын кезектесіп тұратын 3D басып шығарылған «омыртқалардан» тұрады. Дегенмен, бұл және осыған ұқсас көптеген робот қолдарының шектеуі бар: олар ұзындығын өзгерте алмауына байланысты тек өздеріне жақын белгілі бір аймақта тиімді жұмыс істей алады.
Жапониядағы Кюсю университетінің Мотоджи Ямамото бастаған инженерлер бұл кемшілікті жеңетін робот қол конструкциясын жасап шығарды. Олар тоқылдақ тілінің ерекше құрылымынан шабыттанды. Икемді, қозғалмалы тіласты сүйегі ұзын, бұл оның бас сүйегін орап, бойымен сырғанау арқылы қозғалуына мүмкіндік береді. Бұл құстың тілінің ағаш қабығының астынан тамақ іздеген кезде тұмсығының ұзындығынан үш есе ұзын болуына мүмкіндік береді.
Манипулятор біліктерінде құрттар орналасқан үш электр қозғалтқышы бар қозғалтқыш модулінен және омыртқаға ұқсас, біркелкі орналасқан «омыртқалар» - дискілер жиынтығынан тұратын, сыртқы бөлігінде 120 градус бұрышта орналасқан үш жартылай шеңбер тәрізді ойықтары бар, олар арқылы икемді тісті шыбықтар өтеді.
Шатыр қозғалтқыш модулінің орталық тесігіне басқару электр қозғалтқыштарының біліктеріндегі үш құрт тәрізді беріліс тісті шыбықтармен байланысып, тіреуішті және шпильді беріліс қорабын құрайтындай етіп орналастырылған. Үш қозғалтқыштың барлығы бірдей жылдамдықпен айналғанда, шатыр қозғалтқыш модулі арқылы алға немесе артқа жылжиды. Егер тек бір қозғалтқыш айналса, оның айналу бағыты шатырдың жазықтықтардың бірінде бір бағытта немесе басқа бағытта ауытқуына әкеледі. Барлық үш тіреуішті және шпильді беріліс қорабын пайдаланып, манипулятор үш бағытта да майыса алады.
Прототип 450 миллиметрге дейін созылып, ең аз радиусы 125 миллиметр болатындай бүгіле алады. Бұл шатыр білігінің, мысалы, контейнерге тартылған кезде ықшам түрде бүктелуіне мүмкіндік береді, бұл оның кеңістікке қойылатын талаптарын азайтады. Манипулятор осі бойымен бірнеше нүктеде орналасқан инерциялық өлшеу бірліктері (ИМУ) оның ағымдағы орны мен пішінін бақылау үшін қолданылады. Бұл бірліктерден алынған ақпарат сонымен қатар Гаусс процесінің регрессия алгоритмін қолдана отырып, манипулятордың ұшына әсер ететін сыртқы күштердің бағыты мен шамасын анықтау үшін де қолданылады.
Инженерлердің пікірінше, болашақ жұмыс бағыттарының бірі - бірнеше қозғалтқыш модульдерін бір «омыртқаға» біріктіру. Бұл манипулятордың иілуін арттыру арқылы оның еркіндік дәрежесін арттырады.
Жоғарыда көрсетілгеннен айырмашылығы, израильдік инженерлер жасаған MASR манипуляторының қозғалатын ішкі емес, сыртқы бөлігі бар. Ол манипулятордың пассивті буындары бойымен, рельстердегідей қозғалатын, әрбір буынды қажетті бұрышқа айналдыратын үш қозғалтқышы бар қозғалатын блоктан тұрады.
Оңтүстік Кореядағы ауылшаруашылық өнімдерін тарату зауытында робот қателесіп қызметкерді конвейер таспасына қысып қойды. Ер адам алған жарақаттарынан қайтыс болды, деп хабарлайды Sky News.
Робототехника компаниясының маманы (аты-жөні көрсетілмеген) сынақтан өткізбес бұрын роботтың сенсорларын тексеру үшін тарату орталығына келді. Робот көкөністер салынған қораптарды паллеттерге үйіп қоюы керек еді.
Оқиға болған Кёнсаннамдо провинциясы полициясының мәліметінше, робот техникті жәшік деп қателесіп, оны конвейер таспасына қысып, «қашып кетуге ешқандай мүмкіндік бермей», беті мен кеудесін жаншып тастаған. Зардап шегуші дереу ауруханаға жеткізілді. Алайда, ол алған жарақаттарынан қайтыс болды.
Құқық қорғау органдары тарату орталығының қауіпсіздік қызметкерлерінің әрекеттерін бағалайды. Оқиғаға кінәлі жұмысшыларға немқұрайлылық үшін қылмыстық айып тағылуы мүмкін. Зауыттың иесі болып табылатын компания әзірлеушілерді жүйенің адам өміріне қауіп төндірмейтініне көз жеткізу үшін оны жақсартуға шақырды.
Маммографиялық робот сүт безін түйіндерді анықтау үшін пальпациялайды, содан кейін ультрадыбыстық зерттеуді қоса алғанда, барлық басқа диагностикалық әдістерді қолданады. Бұл негізінен әйелдің кеудесіне толыққанды мини-ультрадыбыстық аппаратты орнатуды қамтиды.
Бұл ол үшін мүлдем қауіпсіз; ультрадыбыстық зерттеу мүлдем ауыртпалықсыз және арнайы дайындықты қажет етпейді.
Құрылғыны пайдаланып, робот дененің жағдайын анықтайды және аурудың белгілеріне байланысты қажетті емді тағайындауға мүмкіндік береді.
Жапондық Tsubame Industries стартапы Gundam франшизасынан шыққандай көрінетін үлкен роботқа алдын ала тапсырыс қабылдай бастады.
Шамамен 150 миллион жыл бұрын жойылып кеткен археоптерикстің атымен аталған Archax роботының биіктігі 4,5 метр, салмағы 3,5 тонна және ол ішінен басқарылады. Адам-оператор қоршаған ортаны бағалауға арналған төрт монитормен жабдықталған кондиционерленген кабинада орналасқан.
Роботтың ең әсерлі ерекшеліктерінің бірі - тік және көлік режимінде қозғалу мүмкіндігі. Көлік режимінде робот жерге жақынырақ түседі және шамамен 10 км/сағ жылдамдықпен жүре алады.
Tsubame Industries компаниясының 25 жастағы бас директоры Рё Йошида Жапонияның танымал кейбір элементтерін – анимация, ойындар, роботтар және көліктерді – біріктіргісі келетінін айтты.
«Мен «Бұл Жапония» деген жазуы бар нәрсе жасағым келді«
Әрбір роботтың құны шамамен 2,7 миллион доллар болады деп күтілуде. Стартап осындай бес машинаны құрастырып, сатуды жоспарлап отыр. Компания бір жыл ішінде жеткізуді бастауға уәде береді.
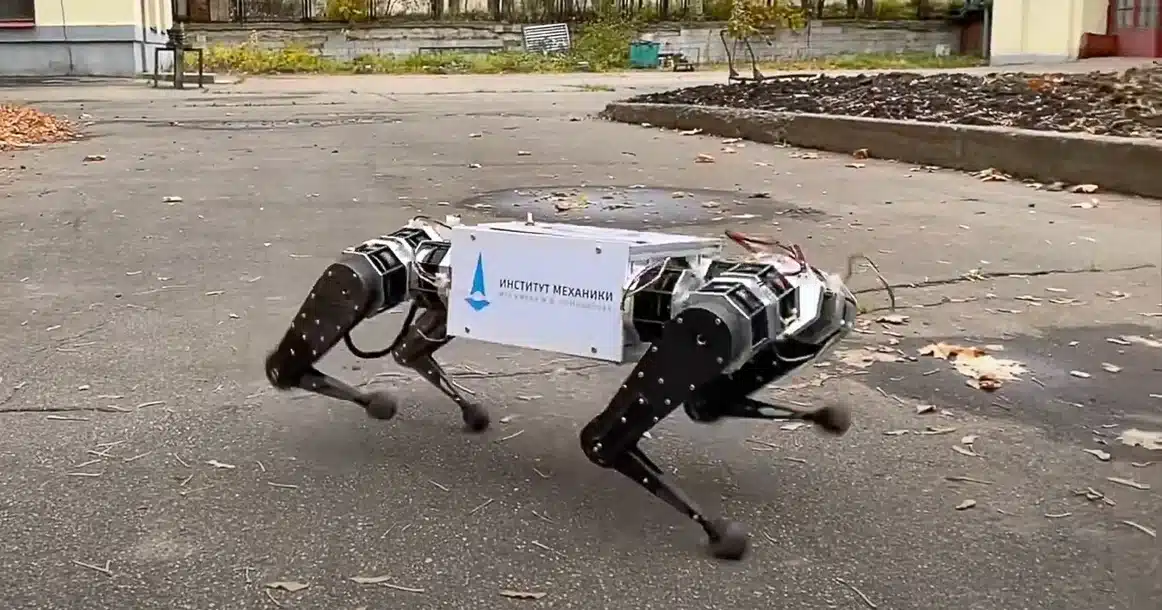
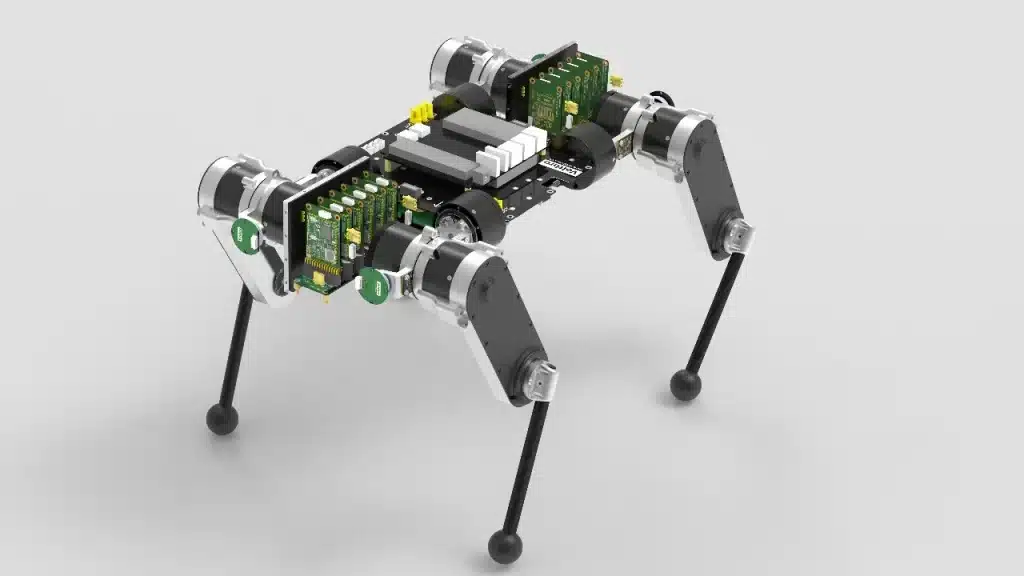
Ресейлік робот-иттің екінші нұсқасы жаңа корпус, жетілдірілген басқару жүйесі және басқа да инновацияларды алды.
Boston Dynamics компаниясының төрт аяқты Spot роботының отандық нұсқасын Мәскеу мемлекеттік университетінің механика институтының инженерлері және Volt Brothers жобасы жасады. Жаңа робот 2021 жылы таныстырылған робот иттің алғашқы нұсқасының ізашары болады.
Robopes 1.0 - Ресейдегі төмен тотықсыздану коэффициенттері бар щеткасыз қозғалтқыштарды пайдаланып жасалған алғашқы робот. Оның жаңа нұсқасы заманауи жаяу жүру робототехникасын әзірлейтін зерттеу топтарына бағытталған, деп хабарлайды Мәскеу мемлекеттік университетінің баспасөз қызметі. Ол сондай-ақ мектеп оқушылары мен студенттерді оқытуға да жарамды.
Жаңалықтар
Соңғы екі жылда мамандар роботтың корпусын қайта жасады. Оның форма факторы өзгертілді, бұл робот итпен үстел үстінде жұмыс істеуді жеңілдетті. Оған қосымша жабдықты қосу да оңайырақ.
«Біз роботтың жаңа нұсқасын барлық деңгейдегі бағдарламалық жасақтама тұрғысынан әзірлеуге мүмкіндігінше ашық етіп жасадық, бұл басқа ешбір робот мақтана алмайтын нәрсе», - дейді Мәскеу мемлекеттік университетінің механика институтының жетекші инженері Антон Рогачев.
Роботты роботтың операциялық жүйесі басқарады. Оны лидар және тереңдік камераларын қоса алғанда, жаңа сенсорлармен жаңартуға болады. Бұл сенсорлар роботқа қабырғалар мен кедергілерді тануға мүмкіндік береді.
Тағы бір жаңа мүмкіндік - жақсартылған басқару элементтері. Тіпті джойстик те жарайды. Роботтың әдепкі жүрісі - 3,5 км/сағ жылдамдықпен жүгіру. Робот қол алысып, жатып, кез келген қалыптан тұра алады. Батареяның қызмет ету мерзімі 60 минутқа дейін.
Роботтың әзірлемесі туралы толығырақ ақпарат және оның тікелей көрсетілімі 7 қазанда Мәскеу уақыты бойынша сағат 12:30-да Красная Преснядағы (Мәскеу) Экспоцентрде жоспарланған.
Жапонияның оңтүстік-батысындағы Кумамото қаласында оқушылардың орнына роботтар сабаққа қатысатын болады, деп хабарлайды Mainichi Shimbun газеті. Бұл жергілікті білім беру кеңесінің сабаққа келмеумен күресу әрекеті.
Негізінен, андроидтар оқушылардың аватарлары ретінде әрекет етеді, бұл оларға сабақтарға қашықтан қатысуға мүмкіндік береді. Роботтар микрофондармен, динамиктермен және кері байланыс үшін камералармен жабдықталған. Олардың биіктігі шамамен бір метр. Роботтардың кеудесіне орнатылған планшеттерді үйден басқаруға болады. Балалар сыныптастарымен және мұғалімдерімен талқылауларға қатыса алады.
The Guardian басылымының хабарлауынша, роботтар мектеп ішінде де қозғалып, түрлі іс-шараларға «қатысады».
Жоба қараша айында іске қосылады, нәтижелері наурыз айында бағаланады. Мақсат - сабаққа оралуды жоспарлап отырған оқушылардың мазасыздығын жеңілдету. 2023 қаржы жылына арналған қосымша бюджетке жобаға шамамен 10 550 АҚШ доллары (шамамен 1 миллион рубль) бөлінген. Жоба екі робот жасауды жоспарлап отыр.
Бұл шаралар сабаққа келмеушіліктің артуына байланысты қабылданды. The Guardian газетінің хабарлауынша, олар коронавирус пандемиясымен байланысты болуы мүмкін. 2018 оқу жылында 1283 оқушы сабаққа келмеген, ал 2022 оқу жылында 2760 оқушы сабаққа келмеген.
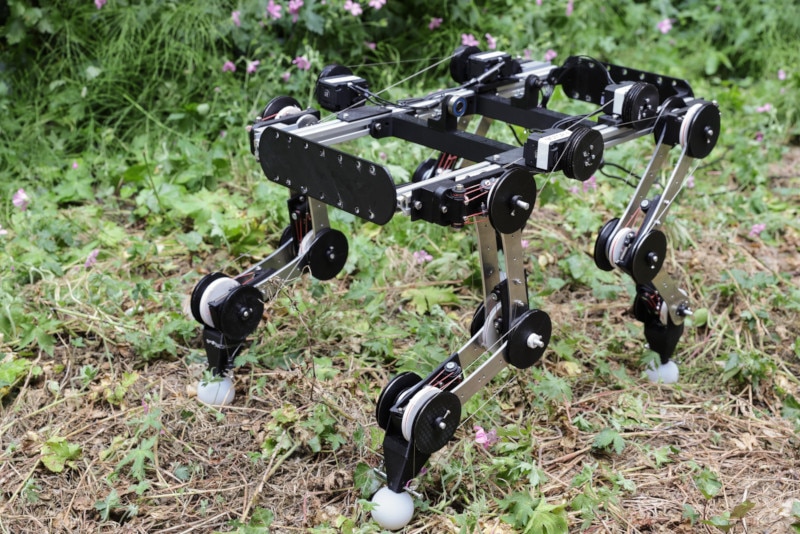
Ит тәрізді роботтар робототехниканың негізгі саласы болып табылады, ал Лозаннадағы Швейцария Федералды технология институтының инженерлері жаңа жетістіктерге қол жеткізді. Олардың тәжірибелік роботы қозғалтқыштары өшірілген кезде де жүгіру жолында қозғала береді — оған тек қарсы салмақ қажет.
Жобаны канадалық робототехника студенті Микаэл Ачкар әзірледі және нақты иттердің қозғалысын түсіру деректеріне негізделген. Негізгі компоненттік талдауды қолдана отырып, деректер иттің негізгі қозғалыс осьтерін сипаттайтын бірнеше векторларға топтастырылды, бұл механизмнің дизайнының негізі болды.
Роботтың дизайны бойлық осіне қатысты симметриялы. Оның аяқ-қол сүйектері металл шыбықтармен, буындары 3D басып шығарылған полимер блоктармен, ал сіңірлері жұқа болат кабельдермен ауыстырылған. Машинаның төрт аяғының әрқайсысында нағыз иттің аяғындағыдай үш буын бар және әрқайсысы бір-бірімен механикалық түрде тураланған.
Машинаның алғашқы сынағы кезінде жобаға қатысушыларды тосынсый күтіп тұрды: роботтың жетектері іске қосылғаннан кейін, ол ешқандай қозғалтқыш тірегінсіз тәуелсіз қозғала берді. Қозғалысты сақтау үшін қажетті жалғыз компонент жүгіру жолы болды. Робот әр аяқты қуаттандыратын қозғалтқыштармен жабдықталған, бірақ бұл қозғалтқыштарды өшіруге болады.
«Алдымен біз мұны кездейсоқтық деп ойладық. Сондықтан біз дизайнды аздап өзгертіп, роботты қайтадан сынап көрдік, бірақ ол енді жұмыс істей алмады», - деп түсіндірді жоба жасаушысы. Машинаның қозғалысын қамтамасыз ету үшін оның артқы жағына маятник тәрізді қарсы салмақ бекітіліп, оның жүгіру қозғалысын қолдады. Бұл, әрине, мәңгілік қозғалыс машинасы емес: оған секіріп, кедергілерді жеңу үшін қозғалтқыш қажет.
«Біздің мақсатымыз - жоғары технологиялық ит тәрізді роботтармен бәсекелесу емес, керісінше, биологиялық прототиптерге негізделген роботтық дизайндарды зерттеу. Бұл роботтың негізгі дизайнын жетілдіруді және оның пассивті қасиеттерін тек қарапайым басқару жүйелері қажет болатындай етіп өзгертуді қамтиды - мұның бәрі роботтың мүмкіндіктерін барынша арттыра отырып. Біз мұнда жасаған нәрсе - бірге жұмыс істейтін буындарды жобалау - роботтық қолдар мен басқа да дене мүшелерін жасау үшін өзінің пайдалылығын дәлелдеді», - деп қорытындылады Микаэль Ашкар.