Ғалымдар роботтарға арналған нейроморфты жасанды терінің прототипін жасағанын хабарлады . Авторлар бұл әзірлеме адамның жүйке жүйесінің жұмыс принциптерінен шабыттанғанын атап өтті. Дәстүрлі сенсорлардан айырмашылығы, ол биологиялық нейрондарға ұқсас импульстік сигналдарды пайдаланады
Жасанды былғары қалай жұмыс істейді?
Жанасу және қысым туралы ақпарат электрлік «тікенектер» ретінде кодталады. Әрбір сенсордың өзіндік идентификаторы бар. Импульстардың пішіні, амплитудасы және ұзақтығы деректерді беру үшін қолданылады.
Келесі деңгейде сигналдар жұлынға ұқсас модульге жіберіледі. Онда олар сүзіледі, локализацияланады және талданады. Бұл құрылғы ауырсыну шегін де орнатады. Ол асып кеткенде, робот қысым жасауды тоқтатады және манипуляторды алып тастайды.
Процессордың қатысуынсыз рефлекстер
Негізгі жауаптар архитектураның ең төменгі деңгейінде бағдарламаланған. Бұл роботқа орталық өңдеуді қажет етпей, лезде жауап беруге мүмкіндік береді. Бұл тәсіл адамдармен, соның ішінде қарт адамдармен және аурухана пациенттерімен өзара әрекеттесу кезінде маңызды.
Сонымен қатар, сенсорлар мезгіл-мезгіл басқару импульсін жібереді. Оның болмауы тері сегментінің зақымдалғанын көрсетеді. Магниттік бекітпе ақаулы элементті тез ауыстыруға мүмкіндік береді.

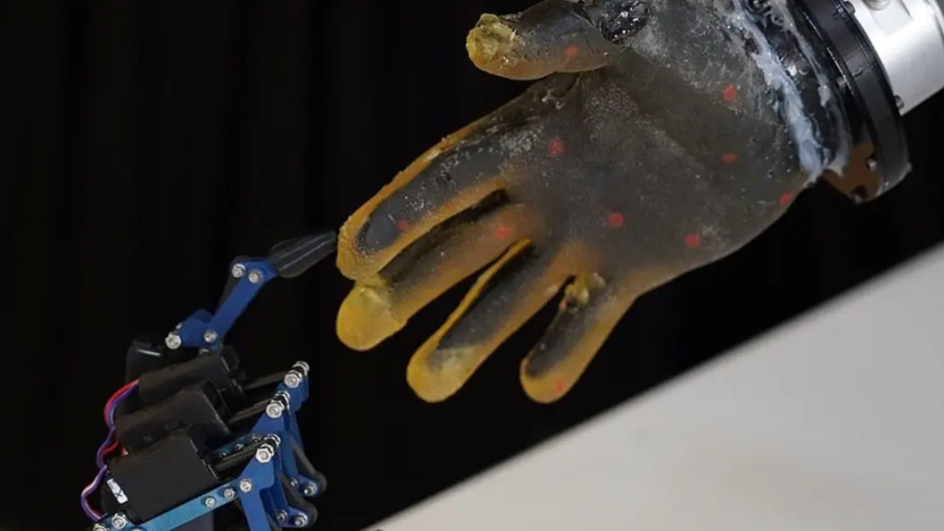
Әзірге тек қысым ғана
Жасанды тері қазіргі уақытта тек қысымды анықтайды. Температураны және басқа да сезімдерді анықтау үшін жаңа сенсорлар қажет болады. Ғалымдардың пікірінше, бұл тек биологияның жуықтауы болса да, жүйке желілерінің жұмысы сенсорлық және есептеу мүмкіндіктерінің осындай симбиозы үшін оңтайлы негіз болып табылады.