
Жапония мен Ұлыбритания инженерлері ұзындығы өзгермелі икемді робот қолының прототипін жасап шығарды. Тірек және құрт механизмін пайдаланып, робот қолы максималды ұзындығы 450 миллиметрге дейін созылып, минималды радиусы 125 миллиметрге дейін бүгілуі мүмкін. Мақала IEEE Robotics and Automation Letters журналында жарияланды.
Шатыр тәрізді робот қолдарының негізгі артықшылықтарының бірі - олардың икемділігі мен ептілігі. Бұл қасиеттер робот қолдарының жетуі қиын жерлерге жетуіне мүмкіндік береді, бұл оларды хирургия сияқты қолданбалар үшін перспективалы етеді. Олар әдетте жұмсақ және икемді материалдардан жасалған, бірақ қатты нұсқалары да бар. Мысалы, британдық инженерлер әзірлеген манипулятордың құрылымы екі бағытта да иілуге қабілетті құрылымды құрайтын кезектесіп тұратын 3D басып шығарылған «омыртқалардан» тұрады. Дегенмен, бұл және осыған ұқсас көптеген робот қолдарының шектеуі бар: олар ұзындығын өзгерте алмауына байланысты тек өздеріне жақын белгілі бір аймақта тиімді жұмыс істей алады.
Жапониядағы Кюсю университетінің Мотоджи Ямамото бастаған инженерлер бұл кемшілікті жеңетін робот қол конструкциясын жасап шығарды. Олар тоқылдақ тілінің ерекше құрылымынан шабыттанды. Икемді, қозғалмалы тіласты сүйегі ұзын, бұл оның бас сүйегін орап, бойымен сырғанау арқылы қозғалуына мүмкіндік береді. Бұл құстың тілінің ағаш қабығының астынан тамақ іздеген кезде тұмсығының ұзындығынан үш есе ұзын болуына мүмкіндік береді.

Манипулятор біліктерінде құрттар орналасқан үш электр қозғалтқышы бар қозғалтқыш модулінен және омыртқаға ұқсас, біркелкі орналасқан «омыртқалар» - дискілер жиынтығынан тұратын, сыртқы бөлігінде 120 градус бұрышта орналасқан үш жартылай шеңбер тәрізді ойықтары бар, олар арқылы икемді тісті шыбықтар өтеді.
Шатыр қозғалтқыш модулінің орталық тесігіне басқару электр қозғалтқыштарының біліктеріндегі үш құрт тәрізді беріліс тісті шыбықтармен байланысып, тіреуішті және шпильді беріліс қорабын құрайтындай етіп орналастырылған. Үш қозғалтқыштың барлығы бірдей жылдамдықпен айналғанда, шатыр қозғалтқыш модулі арқылы алға немесе артқа жылжиды. Егер тек бір қозғалтқыш айналса, оның айналу бағыты шатырдың жазықтықтардың бірінде бір бағытта немесе басқа бағытта ауытқуына әкеледі. Барлық үш тіреуішті және шпильді беріліс қорабын пайдаланып, манипулятор үш бағытта да майыса алады.
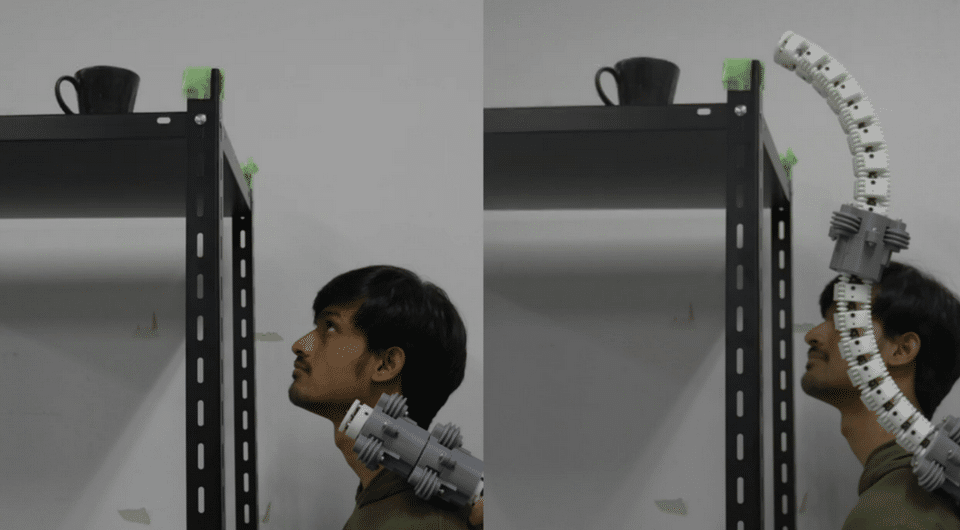
Прототип 450 миллиметрге дейін созылып, ең аз радиусы 125 миллиметр болатындай бүгіле алады. Бұл шатыр білігінің, мысалы, контейнерге тартылған кезде ықшам түрде бүктелуіне мүмкіндік береді, бұл оның кеңістікке қойылатын талаптарын азайтады. Манипулятор осі бойымен бірнеше нүктеде орналасқан инерциялық өлшеу бірліктері (ИМУ) оның ағымдағы орны мен пішінін бақылау үшін қолданылады. Бұл бірліктерден алынған ақпарат сонымен қатар Гаусс процесінің регрессия алгоритмін қолдана отырып, манипулятордың ұшына әсер ететін сыртқы күштердің бағыты мен шамасын анықтау үшін де қолданылады.
Инженерлердің пікірінше, болашақ жұмыс бағыттарының бірі - бірнеше қозғалтқыш модульдерін бір «омыртқаға» біріктіру. Бұл манипулятордың иілуін арттыру арқылы оның еркіндік дәрежесін арттырады.
Жоғарыда көрсетілгеннен айырмашылығы, израильдік инженерлер жасаған MASR манипуляторының қозғалатын ішкі емес, сыртқы бөлігі бар. Ол манипулятордың пассивті буындары бойымен, рельстердегідей қозғалатын, әрбір буынды қажетті бұрышқа айналдыратын үш қозғалтқышы бар қозғалатын блоктан тұрады.


