
MIT инженерлері 11 секундта он рет сальто жасап, жәндіктерге қарағанда жылдамырақ күрт бұрылыстар жасай алатын ұшатын микророботты таныстырды Құрылғы экстремалды маневрлеуді, ықшамдылықты және жылдамдықты біріктіреді, бұл оны тірі тіршілік иелерінің биомеханикасын дәл қайталайтын алғашқы механизмге айналдырады.
Ұшуды басқарудағы төңкеріс
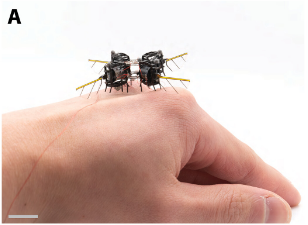
Зерттеушілер роботтың өлшемі микрокассета таспасымен салыстыруға болатынын және салмағы қағаз қыстырғыштан жеңіл екенін түсіндірді. Қанаттар жұмсақ жасанды бұлшықеттермен жұмыс істейді, бұл маневрлер мен найзағайдай жылдам үдеуді қамтамасыз етеді. Дегенмен, басты жетістік басқару жүйесінде. Инженерлер екі деңгейлі жасанды интеллект контроллерін жасап шығарды. Бірінші деңгей тіпті сальтоларды жоспарлай алатын модельді болжауға негізделген басқаруды пайдаланады. Екіншісі күрделі жоспарлаушының әрекетін қайталайтын, бірақ нақты уақыт режимінде және есептеу шығындарынсыз жұмыс істейтін ықшам нейрондық желіні пайдаланады.

Эволюциядан асып түскен нәтижелер
Команданың мәліметі бойынша, жаңа робот алдыңғы нұсқаларға қарағанда 4,5 есе жылдам ұшады және 2,5 есе жылдам үдейді. Сынақтарда ол 11 секундта он рет сальто жасап, тіпті желді жағдайларда да траекториясынан бес сантиметрден аспайтын ауытқып кетті. Сондай-ақ, ол жәндіктердің көру қабілетін тұрақтандыру үшін қолданатын өткір «секірулерді» қайталайды. Келесі қадам - роботтың сыртқы бақылаусыз жұмыс істеуіне мүмкіндік беретін визуалды сенсорлары бар толықтай автономды навигация. Профессор Кевин Чен жобаның мақсаты - кәдімгі дрондар жете алмайтын жерлерге ене алатын құрылғылар жасау екенін мәлімдеді.


