Ит тәрізді роботтар робототехниканың негізгі саласы болып табылады, ал Лозаннадағы Швейцария Федералды технология институтының инженерлері жаңа жетістіктерге қол жеткізді. Олардың тәжірибелік роботы қозғалтқыштары өшірілген кезде де жүгіру жолында қозғала береді — оған тек қарсы салмақ қажет.
Жобаны канадалық робототехника студенті Микаэл Ачкар әзірледі және нақты иттердің қозғалысын түсіру деректеріне негізделген. Негізгі компоненттік талдауды қолдана отырып, деректер иттің негізгі қозғалыс осьтерін сипаттайтын бірнеше векторларға топтастырылды, бұл механизмнің дизайнының негізі болды.
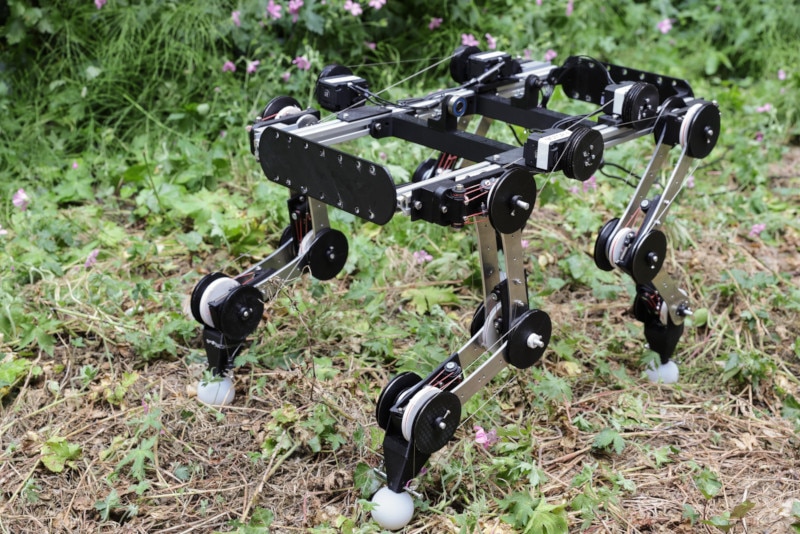
Роботтың дизайны бойлық осіне қатысты симметриялы. Оның аяқ-қол сүйектері металл шыбықтармен, буындары 3D басып шығарылған полимер блоктармен, ал сіңірлері жұқа болат кабельдермен ауыстырылған. Машинаның төрт аяғының әрқайсысында нағыз иттің аяғындағыдай үш буын бар және әрқайсысы бір-бірімен механикалық түрде тураланған.
Машинаның алғашқы сынағы кезінде жобаға қатысушыларды тосынсый күтіп тұрды: роботтың жетектері іске қосылғаннан кейін, ол ешқандай қозғалтқыш тірегінсіз тәуелсіз қозғала берді. Қозғалысты сақтау үшін қажетті жалғыз компонент жүгіру жолы болды. Робот әр аяқты қуаттандыратын қозғалтқыштармен жабдықталған, бірақ бұл қозғалтқыштарды өшіруге болады.
«Алдымен біз мұны кездейсоқтық деп ойладық. Сондықтан біз дизайнды аздап өзгертіп, роботты қайтадан сынап көрдік, бірақ ол енді жұмыс істей алмады», - деп түсіндірді жоба жасаушысы. Машинаның қозғалысын қамтамасыз ету үшін оның артқы жағына маятник тәрізді қарсы салмақ бекітіліп, оның жүгіру қозғалысын қолдады. Бұл, әрине, мәңгілік қозғалыс машинасы емес: оған секіріп, кедергілерді жеңу үшін қозғалтқыш қажет.
«Біздің мақсатымыз - жоғары технологиялық ит тәрізді роботтармен бәсекелесу емес, керісінше, биологиялық прототиптерге негізделген роботтық дизайндарды зерттеу. Бұл роботтың негізгі дизайнын жетілдіруді және оның пассивті қасиеттерін тек қарапайым басқару жүйелері қажет болатындай етіп өзгертуді қамтиды - мұның бәрі роботтың мүмкіндіктерін барынша арттыра отырып. Біз мұнда жасаған нәрсе - бірге жұмыс істейтін буындарды жобалау - роботтық қолдар мен басқа да дене мүшелерін жасау үшін өзінің пайдалылығын дәлелдеді», - деп қорытындылады Микаэль Ашкар.