ძაღლის მსგავსი რობოტები რობოტიკის ერთ-ერთი მთავარი დარგია და ლოზანაში მდებარე შვეიცარიის ფედერალური ტექნოლოგიური ინსტიტუტის ინჟინრებმა ახალი მიღწევების მიღწევა შეძლეს. მათი ექსპერიმენტული რობოტი ძრავების გამორთვის შემდეგაც კი აგრძელებს მოძრაობას სარბენ ბილიკზე - მას მხოლოდ საპირწონე სჭირდება.
პროექტი შეიმუშავა კანადელმა რობოტიკის სტუდენტმა მიკაელ აჩკარმა და ის რეალური ძაღლების მოძრაობის აღბეჭდვის მონაცემებს ეფუძნებოდა. მთავარი კომპონენტების ანალიზის გამოყენებით, მონაცემები დაჯგუფდა რამდენიმე ვექტორად, რომლებიც აღწერდნენ ძაღლის მოძრაობის ძირითად ღერძებს, რაც მექანიზმის დიზაინის საფუძველს წარმოადგენდა.
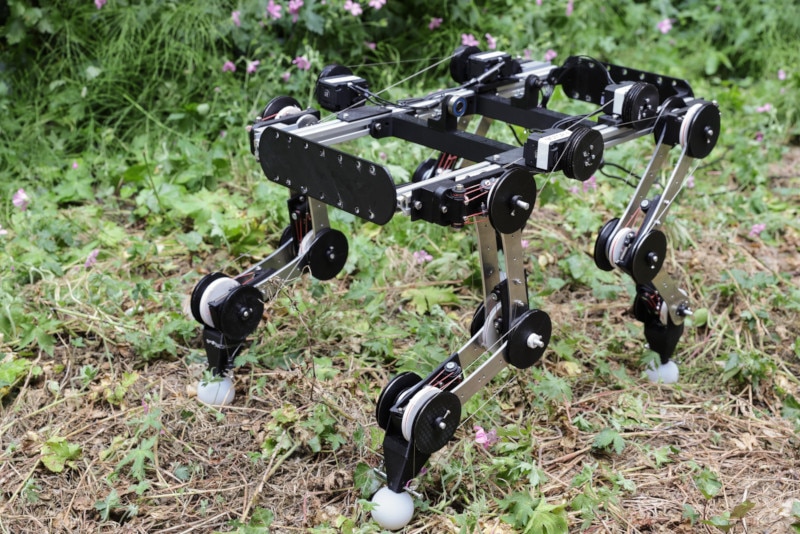
რობოტის დიზაინი სიმეტრიულია მისი გრძივი ღერძის მიმართ. მისი კიდურების ძვლები ლითონის ღეროებითაა ჩანაცვლებული, სახსრები - 3D პრინტერით დაბეჭდილი პოლიმერული ბლოკებით, ხოლო მყესები - თხელი ფოლადის კაბელებით. მანქანის ოთხივე ფეხს სამი სახსარი აქვს, როგორც ნამდვილი ძაღლის ფეხს, და თითოეული მექანიკურად გასწორებულია სხვებთან.
აპარატის პირველი ტესტირებისას პროექტის მონაწილეებს სიურპრიზი დახვდათ: რობოტის ამძრავების გააქტიურების შემდეგ, ის დამოუკიდებლად, ყოველგვარი ძრავის მხარდაჭერის გარეშე აგრძელებდა მოძრაობას. მოძრაობის შესანარჩუნებლად საჭირო ერთადერთი კომპონენტი სარბენი ბილიკი იყო. რობოტი აღჭურვილია ძრავებით, რომლებიც თითოეულ ფეხს ამუშავებს, თუმცა ამ ძრავების გამორთვა შესაძლებელია.
„თავიდან ვიფიქრეთ, რომ ეს შემთხვევითობა იყო. ამიტომ, ოდნავ შევცვალეთ დიზაინი და ხელახლა გამოვცადეთ რობოტი - და ის აღარ ფუნქციონირებდა“, - განმარტა პროექტის შემქმნელმა. მანქანის მოძრაობის შესანარჩუნებლად, მის უკანა მხარეს მიმაგრებული იყო ქანქარას მსგავსი საპირწონე, რათა მისი მოძრაობა უზრუნველყოფილიყო. ეს ნამდვილად არ არის მუდმივი მოძრაობის მანქანა: მას ხტომისა და დაბრკოლებების დასაძლევად ძრავა სჭირდება.
„ჩვენი მიზანი არ არის მაღალტექნოლოგიურ ძაღლების მსგავს რობოტებთან კონკურენცია, არამედ ბიოლოგიურ პროტოტიპებზე დაფუძნებული რობოტული დიზაინის შესწავლა. ეს გულისხმობს რობოტის ფუნდამენტური დიზაინის დახვეწას და მისი პასიური თვისებების მოდიფიცირებას ისე, რომ მხოლოდ მარტივი მართვის სისტემები იყოს საჭირო - რობოტის შესაძლებლობების მაქსიმიზაციის პარალელურად. ის, რაც აქ გავაკეთეთ - ერთად მუშაობისთვის სახსრების დიზაინი - უკვე დაამტკიცა თავისი სარგებლიანობა რობოტული ხელებისა და სხეულის სხვა ნაწილების შესაქმნელად“, - დაასკვნა მიკაელ აშკარმა.