Agility Robotics-მა აჩვენა, თუ როგორ მუშაობს თანამედროვე ხელოვნური ინტელექტით აღჭურვილი რობოტი. წინამორბედებისგან განსხვავებით, ის ბუნებრივი ენის ბრძანებებს ესმის, როგორიცაა: „აიღეთ დართ ვეიდერის ლაზერული ხმლის ფერის ყუთი და მოათავსეთ წინა რიგში ყველაზე მაღალ კოშკზე“.
როგორც წესი, რობოტების მიერ წარმოუდგენელი მიღწევების შემსრულებელი ვიდეოები დაპროგრამებულ ქცევას ეფუძნება. ცდისა და შეცდომის მეთოდით, ადამიანები აპროგრამებენ რობოტებს კონკრეტული მოქმედებების შესასრულებლად სხვადასხვა პირობებში და შედეგები გარედან მხოლოდ ავტონომიურ მოქმედებებად გვეჩვენება. Agility Robotics განსხვავებულია, რადგან რობოტი არ არის დაპროგრამებული; ის ესმის და ასრულებს მისთვის ბუნებრივ ენაზე მიცემულ ბრძანებებს.
ტესტირებისთვის აშენდა საწყობის მსგავსი შენობა სხვადასხვა სიმაღლის დანომრილი კოშკებითა და სხვადასხვა მახასიათებლების მქონე სამი ყუთით. რობოტმა გააანალიზა გარემო, მაგრამ არ მიიღო დაპროგრამებული ინსტრუქციები მოქმედებებისთვის. მანქანის „აზროვნების“ პროცესი დაახლოებით ასე მიმდინარეობდა: „უნდა გავიგო, რომელი ბრძანებების გამოყენება შემიძლია დავალების შესასრულებლად“, „დართ ვეიდერის ლაზერული მახვილი წითელია, ამიტომ წითელი ყუთი უნდა ავიღო“, „პირველ რიგში ყველაზე მაღალი კოშკი მე-4 კოშკია“, „ჯერ წითელ ყუთს ავიღებ, შემდეგ მე-4 კოშკზე გადავალ“, „მე მე-4 კოშკში ვარ, ამიტომ წითელი ყუთი თავზე უნდა დავდო“ და ა.შ.
Agility Robotics-მა აღნიშნა, რომ მათი დემონსტრირების მიზანი იყო იმის დემონსტრირება, თუ როგორ შეუძლია თანამედროვე ხელოვნურ ინტელექტს რობოტები ნამდვილად სასარგებლო გახადოს. კომპანია ამჟამად აშშ-ში აშენებს ქარხანას, რომელიც ყოველწლიურად 10 000 ჰუმანოიდ რობოტს გამოუშვებს. ზოგიერთი მათგანი Amazon-ის საწყობებში განთავსდება.
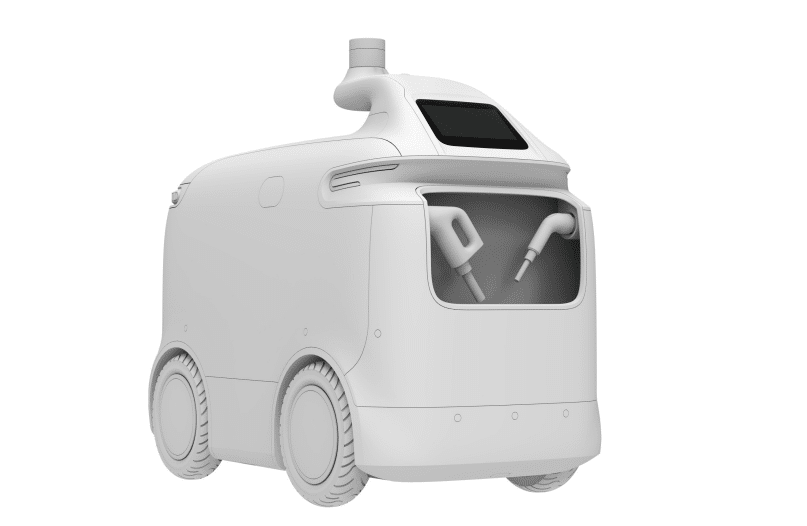
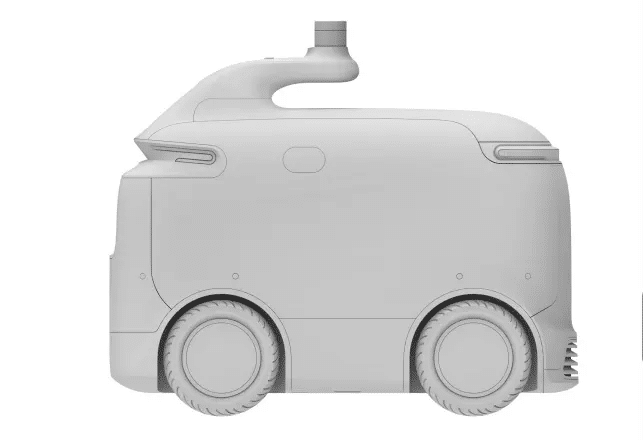
კომპანიამ ელექტრომობილების მობილური დამტენი სადგურის პატენტი შეიტანა . მოწყობილობა გარკვეულწილად Yandex-ის კურიერ რობოტს მოგვაგონებს და, სავარაუდოდ, ავტონომიურიც იქნება.
აპლიკაციაში აღწერილი დიზაინი მოიცავს ორ მუდმივ და ცვლადი დენის დამტენ პისტოლეტს, ასევე სენსორების დიდ რაოდენობას, ლიდარს და მომხმარებლის ინტერფეისის ეკრანს. ეს კარგი გადაწყვეტაა იმ რეგიონებისთვის, სადაც ინფრასტრუქტურა ვერ აკმაყოფილებს ელექტრომობილებზე მოთხოვნას.
იაპონიის მობილობის შოუზე ტექნოლოგიურმა კომპანიებმა წარმოადგინეს გაჯეტების, თვითმფრინავების, რობოტების და სხვა ტექნოლოგიების განსაცვიფრებელი ნაკრები.
სტუმრების ყურადღება განსაკუთრებით ერთმა გამოგონებამ მიიპყრო: ოთხფეხა მოსიარულე რობოტმა, რომელსაც ოთხამდე მგზავრის გადაყვანა შეუძლია.
იაპონური მწარმოებელი Sansei Technologies- ის მიერ შექმნილი პროტოტიპი SR-02 „ ვარსკვლავური ომების“ AT-AT სასიარულო მანქანისა და მარტორქის ნაჯვარს წააგავს . ის გასართობი პარკის ატრაქციონებისთვის იყო შექმნილი.
რობოტი პირველად გასული წლის თებერვალში წარადგინეს, სანსეიმ განაცხადა, რომ ეს განვითარება „ოთხ ფეხზე სიარულის დროს დინამიური მოძრაობის სრულიად ახალ გამოცდილებას“ შესთავაზებდა.
პროტოტიპის სიგრძე 3 მეტრზე ოდნავ მეტია, სიგანე კი 1,5 მეტრი. რობოტის მართვა შესაძლებელია როგორც დისტანციურად, ასევე უშუალოდ სალონში მყოფი ოპერატორის მიერ.
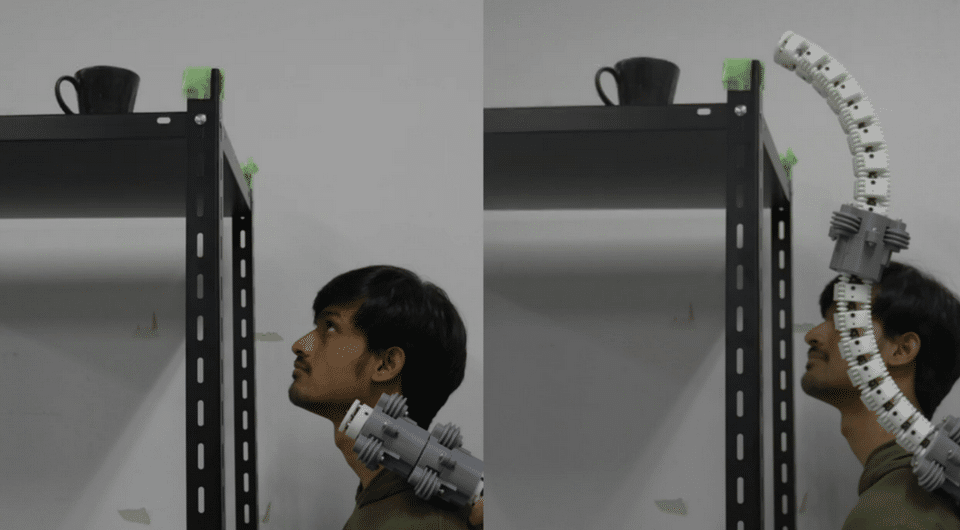
იაპონიიდან და დიდი ბრიტანეთიდან ინჟინრებმა შეიმუშავეს ცვლადი სიგრძის მოქნილი რობოტული მკლავის პროტოტიპი. თაროსა და ჭიის მექანიზმის გამოყენებით, რობოტული მკლავი შეიძლება გაიჭიმოს მაქსიმუმ 450 მილიმეტრამდე და მოიხაროს მინიმუმ 125 მილიმეტრის რადიუსამდე. სტატია გამოქვეყნდა IEEE Robotics and Automation Letters-ში.
საცეცის ფორმის რობოტული მკლავების ერთ-ერთი მთავარი უპირატესობა მათი მოქნილობა და სისწრაფეა. ეს თვისებები რობოტული მკლავების საშუალებას აძლევს, მიაღწიონ ძნელად მისადგომ ადგილებს, რაც მათ პერსპექტიულს ხდის ისეთი გამოყენებისთვის, როგორიცაა ქირურგია. ისინი, როგორც წესი, დამზადებულია რბილი და მოქნილი მასალებისგან, მაგრამ არსებობს ხისტი ვერსიებიც. მაგალითად, ბრიტანელი ინჟინრების მიერ შემუშავებული მანიპულატორის სტრუქტურა შედგება 3D პრინტერით დაბეჭდილი „ხერხემლების“ მონაცვლეობითი ვერსიებისგან, რომლებიც ქმნიან სტრუქტურას, რომელსაც შეუძლია ორივე მიმართულებით მოხრა. თუმცა, ამ და ბევრ მსგავს რობოტურ მკლავს აქვს შეზღუდვა: მათ შეუძლიათ ეფექტურად იმუშაონ მხოლოდ მათთან ახლოს მდებარე კონკრეტულ ადგილას, რადგან არ შეუძლიათ სიგრძის შეცვლა.
იაპონიის კიუშუს უნივერსიტეტის მოტოჯი იამამოტოს ხელმძღვანელობით ინჟინრებმა შეიმუშავეს რობოტული მკლავის დიზაინი, რომელიც ამ ნაკლოვანებას აგვარებს. ისინი შთაგონებულნი იყვნენ კოდალას ენის უჩვეულო სტრუქტურით. მოქნილი, მობილური ჰიოიდური ძვალი გრძელია, რაც საშუალებას აძლევს მას თავის ქალას შემოეხვიოს და მასზე სრიალის გზით იმოძრაოს. ეს საშუალებას აძლევს ფრინველის ენას, ხის ქერქის ქვეშ საკვების ძიებისას, ნისკარტის სიგრძეზე სამჯერ გაიშალოს.
მანიპულატორი შედგება სამი ელექტროძრავიანი ძრავის მოდულისგან, რომელთა ლილვებზეც ჭიებია განლაგებული და მოქნილი საცეცისგან, რომელიც კონსტრუქციით ხერხემლის მსგავსია და შედგება თანაბრად განლაგებული „ხერხემლების“ - დისკების ნაკრებისგან, გარე ნაწილზე 120 გრადუსზე განლაგებული სამი ნახევარწრიული ჭრილით, რომლებშიც გადიან მოქნილი კბილანებიანი ღეროები.
საცეცი ძრავის მოდულის ცენტრალურ ხვრელშია განთავსებული ისე, რომ მართვის ელექტროძრავების ლილვებზე არსებული სამი ჭიაყელა გადაცემათა კოლოფი ეხებოდეს კბილანებიან ღეროებს და ქმნის თაროსებრ-პინიონურ ტრანსმისიას. როდესაც სამივე ძრავი ერთი და იგივე სიჩქარით ბრუნავს, საცეცი ძრავის მოდულში წინ ან უკან მოძრაობს. თუ მხოლოდ ერთი ძრავი ბრუნავს, მისი ბრუნვის მიმართულება იწვევს საცეცის გადახრას ერთი ან მეორე მიმართულებით ერთ-ერთ სიბრტყეში. სამივე თაროსებრ-პინიონური ტრანსმისიის გამოყენებით, მანიპულატორს შეუძლია სამივე მიმართულებით მოიხაროს.
პროტოტიპს შეუძლია 450 მილიმეტრამდე გაიშალოს და მინიმუმ 125 მილიმეტრი რადიუსით მოიხაროს. ეს საშუალებას იძლევა, მაგალითად, კონტეინერში შეკუმშვისას საცეცის ლილვი კომპაქტურად დაკეცილი იყოს, რაც მინიმუმამდე ამცირებს მის სივრცეს. მანიპულატორის ღერძის გასწვრივ რამდენიმე წერტილში განლაგებული ინერციული საზომი ერთეულები (IMU) გამოიყენება მისი მიმდინარე პოზიციისა და ფორმის თვალყურის დევნებისთვის. ამ ერთეულებიდან მიღებული ინფორმაცია ასევე გამოიყენება მანიპულატორის ბოლოზე მოქმედი გარე ძალების მიმართულებისა და სიდიდის დასადგენად გაუსის პროცესის რეგრესიული ალგორითმის გამოყენებით.
ინჟინრების თქმით, სამომავლო სამუშაოს ერთ-ერთი მიმართულება იქნება რამდენიმე საავტომობილო მოდულის ერთ „ხერხემალზე“ გაერთიანება. ეს გაზრდის მანიპულატორის თავისუფლების ხარისხს უფრო მეტი მოხრის საშუალების მიცემით.
ზემოთ ნაჩვენებისგან განსხვავებით, ისრაელელი ინჟინრების მიერ შექმნილ MASR მანიპულატორს შიდა ნაწილის ნაცვლად გარეგანი აქვს, რომელიც მოძრავია. ის შედგება სამი ძრავით მოძრავი ბლოკისგან, რომლებიც მოძრაობენ მანიპულატორის პასიური რგოლების ერთობლიობის გასწვრივ, თითქოს რელსებზე, და თითოეულ რგოლს სასურველ კუთხეზე აბრუნებენ.
სამხრეთ კორეაში, სასოფლო-სამეურნეო დისტრიბუციის ქარხანაში, რობოტმა შეცდომით თანამშრომელი კონვეიერის ლენტაზე მიამაგრა. მამაკაცი მიღებული ჭრილობების შედეგად გარდაიცვალა, იუწყება Sky News.
რობოტიკის კომპანიის სპეციალისტი (სახელი არ სახელდება) სადისტრიბუციო ცენტრში მივიდა, რათა საცდელ გაშვებამდე რობოტის სენსორები შეემოწმებინა. რობოტს ბოსტნეულის ყუთები პალეტებზე უნდა დაეწყო.
კიონგსანნამ-დოს პროვინციის პოლიციის ცნობით, სადაც ინციდენტი მოხდა, რობოტმა ტექნიკოსი გალიაში აერია და კონვეიერის ლენტაზე მიამაგრა, „გაქცევის ყოველგვარი შესაძლებლობის გარეშე, სახე და მკერდი დაუზიანა“. დაშავებული დაუყოვნებლივ საავადმყოფოში გადაიყვანეს. თუმცა, მიყენებული ჭრილობების შედეგად გარდაიცვალა.
სამართალდამცავი ორგანოები შეაფასებენ სადისტრიბუციო ცენტრის უსაფრთხოების თანამშრომლების ქმედებებს. ინციდენტში მონაწილე მუშაკების წინააღმდეგ შესაძლოა სისხლის სამართლის საქმე აღიძრას დაუდევრობისთვის. ქარხნის მფლობელმა კომპანიამ მოუწოდა დეველოპერებს, გააუმჯობესონ სისტემა, რათა უზრუნველყონ, რომ ის საფრთხეს არ შეუქმნის ადამიანის სიცოცხლეს.
მამოგრაფიის რობოტი პალპაციით დაათვალიერებს მკერდს სიმსივნეების აღმოსაჩენად და შემდეგ გამოიყენებს ყველა სხვა დიაგნოსტიკურ ტექნიკას, მათ შორის ულტრაბგერით გამოკვლევას. ეს არსებითად გულისხმობს ქალის მკერდზე სრულფასოვანი მინი ულტრაბგერითი აპარატის დამონტაჟებას.
ეს მისთვის აბსოლუტურად უსაფრთხოა; ულტრაბგერითი გამოკვლევა სრულიად უმტკივნეულოა და არ საჭიროებს რაიმე სპეციალურ მომზადებას.
მოწყობილობის გამოყენებით, რობოტი განსაზღვრავს ორგანიზმის მდგომარეობას და საშუალებას აძლევს მას დანიშნოს საჭირო მკურნალობა დაავადების სიმპტომების მიხედვით.
იაპონურმა სტარტაპმა Tsubame Industries-მა წინასწარი შეკვეთების მიღება დაიწყო მასიური რობოტისთვის, რომელიც თითქოს პირდაპირ Gundam-ის ფრენჩაიზიდანაა გამოსული.
Archax რობოტი, რომელსაც სახელი დაახლოებით 150 მილიონი წლის წინ გადაშენებული არქეოპტერიქსის მიხედვით დაერქვა, 4.5 მეტრის სიმაღლისაა, 3.5 ტონას იწონის და შიგნიდან იმართება. ადამიანი-ოპერატორი განთავსებულია კონდიცირებულ კაბინაში, რომელიც აღჭურვილია ოთხი მონიტორით, რომლებიც გარემოს აფასებენ.
რობოტის ერთ-ერთი ყველაზე შთამბეჭდავი მახასიათებელია მისი როგორც ვერტიკალური, ასევე სატრანსპორტო საშუალების რეჟიმში გადაადგილების უნარი. სატრანსპორტო საშუალების რეჟიმში რობოტი მიწასთან უფრო ახლოს ეშვება და დაახლოებით 10 კმ/სთ სიჩქარით მოძრაობა შეუძლია.
„ცუბამე ინდასტრიზის“ 25 წლის აღმასრულებელმა დირექტორმა, რიო იოშიდამ, განაცხადა, რომ მას სურდა იაპონიაში ცნობილი ზოგიერთი ელემენტის - ანიმაციის, თამაშების, რობოტებისა და მანქანების - ერთში გაერთიანება.
«მინდოდა შემექმნა ისეთი რამ, რაც ეწერა: „ეს იაპონიაა“«
თითოეული რობოტის ღირებულება, სავარაუდოდ, დაახლოებით 2.7 მილიონი დოლარი იქნება. სტარტაპი გეგმავს ამ მანქანებიდან ხუთის აწყობას და გაყიდვას. კომპანია გვპირდება, რომ მიწოდებას ერთი წლის განმავლობაში დაიწყებს.
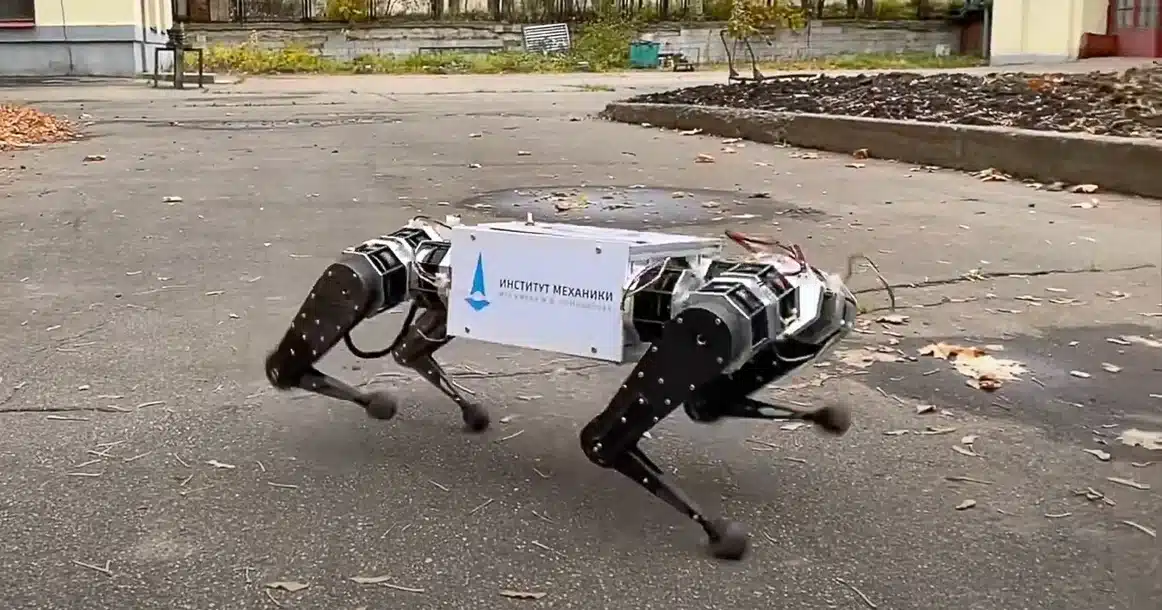
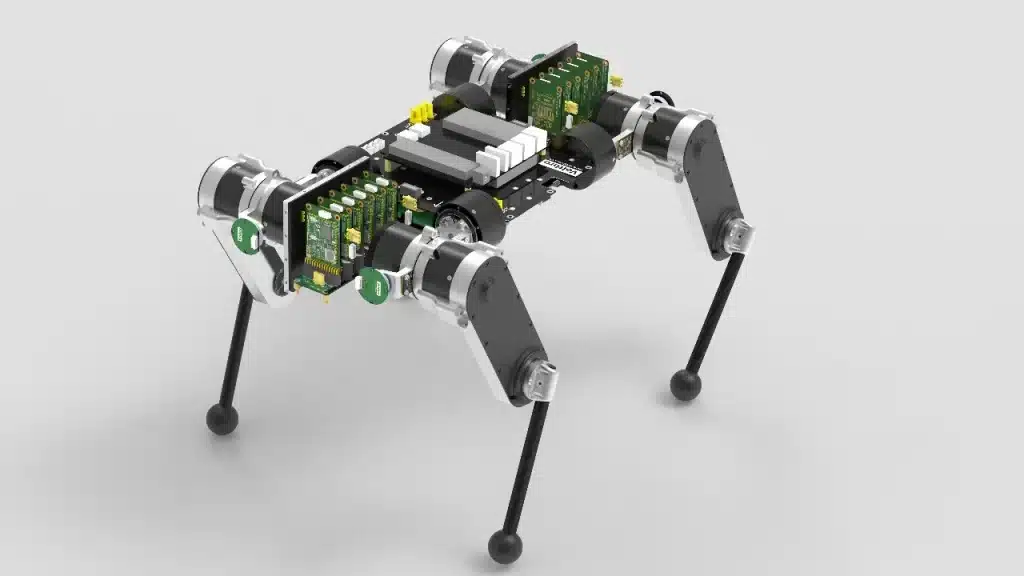
რუსული რობოტი ძაღლის მეორე ვერსიამ მიიღო ახალი კორპუსი, გაუმჯობესებული მართვის სისტემა და სხვა ინოვაციები.
Boston Dynamics-ის ოთხფეხა რობოტის, Spot-ის, სამამულო ვერსია მოსკოვის სახელმწიფო უნივერსიტეტის მექანიკის ინსტიტუტის ინჟინრებმა და Volt Brothers-ის პროექტმა შექმნეს. ახალი რობოტი რობოტი ძაღლის პირველ ვერსიას ცვლის, რომელიც 2021 წელს წარადგინეს.
Robopes 1.0 იყო პირველი რობოტი რუსეთში, რომელიც შეიქმნა დაბალი შემცირების კოეფიციენტის მქონე უჯაგრისო ძრავების გამოყენებით. მოსკოვის სახელმწიფო უნივერსიტეტის პრესსამსახურის ცნობით, მისი ახალი ვერსია განკუთვნილია კვლევითი ჯგუფებისთვის, რომლებიც ავითარებენ თანამედროვე სიარულის რობოტებს. ის ასევე შესაფერისია სკოლის მოსწავლეებისა და სტუდენტების სწავლებისთვის.
რა არის ახალი
ბოლო ორი წლის განმავლობაში სპეციალისტებმა რობოტის კორპუსი ხელახლა დააპროექტეს. მისი ფორმ-ფაქტორი შეიცვალა, რამაც რობოტ ძაღლთან მაგიდაზე მუშაობა გაამარტივა. ასევე, მასთან დამატებითი აღჭურვილობის მიერთებაც გაადვილდა.
„რობოტის ახალი ვერსია მაქსიმალურად ღია გავხადეთ განვითარებისთვის, ყველა დონეზე პროგრამული უზრუნველყოფის თვალსაზრისით, რითაც ვერცერთი სხვა რობოტი ვერ დაიკვეხნის“, - ამბობს ანტონ როგაჩოვი, მოსკოვის სახელმწიფო უნივერსიტეტის მექანიკის ინსტიტუტის წამყვანი ინჟინერი.
რობოტს რობოტის ოპერაციული სისტემა აკონტროლებს. მისი გაუმჯობესება შესაძლებელია ახალი სენსორების დამატებით, მათ შორის ლიდარისა და სიღრმის კამერების. ეს სენსორები რობოტს კედლებისა და დაბრკოლებების ამოცნობის საშუალებას მისცემს.
კიდევ ერთი ახალი ფუნქცია გაუმჯობესებული მართვაა. ჯოისტიკიც კი გამოდგება. რობოტის სტანდარტული სიარული 3.5 კმ/სთ სიჩქარით მოძრაობს. რობოტს შეუძლია ხელის ჩამორთმევა, დაწოლა და ადგომა ნებისმიერი პოზიციიდან. მისი ელემენტის მუშაობის ხანგრძლივობა 60 წუთამდეა.
რობოტის შემუშავებისა და პირდაპირი დემონსტრაციის შესახებ დამატებითი დეტალების მოსმენა 7 ოქტომბერს, მოსკოვის დროით 12:30 საათზე, კრასნაია პრესნიაზე (მოსკოვი) მდებარე ექსპოცენტრში იგეგმება.
იაპონიის სამხრეთ-დასავლეთით მდებარე ქალაქ კუმამოტოში მოსწავლეების ნაცვლად რობოტები დაესწრებიან გაკვეთილებს, იტყობინება გაზეთი „მაინიჩი შინბუნი“. ეს ადგილობრივი განათლების საბჭოს მცდელობაა, ებრძოლოს გაცდენებს.
არსებითად, ანდროიდები სტუდენტების ავატარების როლს შეასრულებენ, რაც მათ საშუალებას მისცემს დისტანციურად მიიღონ მონაწილეობა გაკვეთილებში. რობოტები აღჭურვილია მიკროფონებით, დინამიკებით და კამერებით უკუკავშირისთვის. ისინი დაახლოებით ერთი მეტრის სიმაღლისაა. რობოტების მკერდზე დამონტაჟებული პლანშეტების მართვა სახლიდან იქნება შესაძლებელი. ბავშვებს შეეძლებათ თანაკლასელებთან და მასწავლებლებთან დისკუსიებში მონაწილეობა.
The Guardian-ის ცნობით, რობოტები ასევე იმოძრავებენ სკოლაში და „მიიღებენ მონაწილეობას“ სხვადასხვა აქტივობებში.
პროექტის დაწყება ნოემბერშია დაგეგმილი, შედეგები კი მარტში შეფასდება. მიზანია, შეამსუბუქოს მოსწავლეთა შფოთვა, რომლებიც სწავლაში დაბრუნებას გეგმავენ. 2023 ფისკალური წლის დამატებით ბიუჯეტში უკვე გათვალისწინებულია დაახლოებით 10,550 აშშ დოლარი (დაახლოებით 1 მილიონი რუბლი). პროექტი ორი რობოტის შექმნას გეგმავს.
ეს ზომები მიღებული იქნა გაცდენების ზრდის გამო. The Guardian-ის ცნობით, ისინი, სავარაუდოდ, კორონავირუსის პანდემიას უკავშირდება. 2018 სასწავლო წელს 1283 მოსწავლე არ იყო, ხოლო 2022 სასწავლო წელს 2760 მოსწავლე არ იყო.
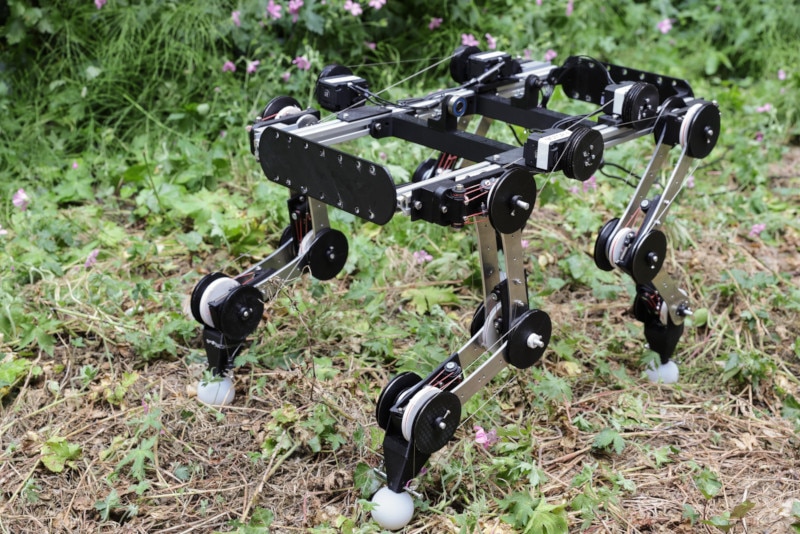
ძაღლის მსგავსი რობოტები რობოტიკის ერთ-ერთი მთავარი დარგია და ლოზანაში მდებარე შვეიცარიის ფედერალური ტექნოლოგიური ინსტიტუტის ინჟინრებმა ახალი მიღწევების მიღწევა შეძლეს. მათი ექსპერიმენტული რობოტი ძრავების გამორთვის შემდეგაც კი აგრძელებს მოძრაობას სარბენ ბილიკზე - მას მხოლოდ საპირწონე სჭირდება.
პროექტი შეიმუშავა კანადელმა რობოტიკის სტუდენტმა მიკაელ აჩკარმა და ის რეალური ძაღლების მოძრაობის აღბეჭდვის მონაცემებს ეფუძნებოდა. მთავარი კომპონენტების ანალიზის გამოყენებით, მონაცემები დაჯგუფდა რამდენიმე ვექტორად, რომლებიც აღწერდნენ ძაღლის მოძრაობის ძირითად ღერძებს, რაც მექანიზმის დიზაინის საფუძველს წარმოადგენდა.
რობოტის დიზაინი სიმეტრიულია მისი გრძივი ღერძის მიმართ. მისი კიდურების ძვლები ლითონის ღეროებითაა ჩანაცვლებული, სახსრები - 3D პრინტერით დაბეჭდილი პოლიმერული ბლოკებით, ხოლო მყესები - თხელი ფოლადის კაბელებით. მანქანის ოთხივე ფეხს სამი სახსარი აქვს, როგორც ნამდვილი ძაღლის ფეხს, და თითოეული მექანიკურად გასწორებულია სხვებთან.
აპარატის პირველი ტესტირებისას პროექტის მონაწილეებს სიურპრიზი დახვდათ: რობოტის ამძრავების გააქტიურების შემდეგ, ის დამოუკიდებლად, ყოველგვარი ძრავის მხარდაჭერის გარეშე აგრძელებდა მოძრაობას. მოძრაობის შესანარჩუნებლად საჭირო ერთადერთი კომპონენტი სარბენი ბილიკი იყო. რობოტი აღჭურვილია ძრავებით, რომლებიც თითოეულ ფეხს ამუშავებს, თუმცა ამ ძრავების გამორთვა შესაძლებელია.
„თავიდან ვიფიქრეთ, რომ ეს შემთხვევითობა იყო. ამიტომ, ოდნავ შევცვალეთ დიზაინი და ხელახლა გამოვცადეთ რობოტი - და ის აღარ ფუნქციონირებდა“, - განმარტა პროექტის შემქმნელმა. მანქანის მოძრაობის შესანარჩუნებლად, მის უკანა მხარეს მიმაგრებული იყო ქანქარას მსგავსი საპირწონე, რათა მისი მოძრაობა უზრუნველყოფილიყო. ეს ნამდვილად არ არის მუდმივი მოძრაობის მანქანა: მას ხტომისა და დაბრკოლებების დასაძლევად ძრავა სჭირდება.
„ჩვენი მიზანი არ არის მაღალტექნოლოგიურ ძაღლების მსგავს რობოტებთან კონკურენცია, არამედ ბიოლოგიურ პროტოტიპებზე დაფუძნებული რობოტული დიზაინის შესწავლა. ეს გულისხმობს რობოტის ფუნდამენტური დიზაინის დახვეწას და მისი პასიური თვისებების მოდიფიცირებას ისე, რომ მხოლოდ მარტივი მართვის სისტემები იყოს საჭირო - რობოტის შესაძლებლობების მაქსიმიზაციის პარალელურად. ის, რაც აქ გავაკეთეთ - ერთად მუშაობისთვის სახსრების დიზაინი - უკვე დაამტკიცა თავისი სარგებლიანობა რობოტული ხელებისა და სხეულის სხვა ნაწილების შესაქმნელად“, - დაასკვნა მიკაელ აშკარმა.