
იაპონიიდან და დიდი ბრიტანეთიდან ინჟინრებმა შეიმუშავეს ცვლადი სიგრძის მოქნილი რობოტული მკლავის პროტოტიპი. თაროსა და ჭიის მექანიზმის გამოყენებით, რობოტული მკლავი შეიძლება გაიჭიმოს მაქსიმუმ 450 მილიმეტრამდე და მოიხაროს მინიმუმ 125 მილიმეტრის რადიუსამდე. სტატია გამოქვეყნდა IEEE Robotics and Automation Letters-ში.
საცეცის ფორმის რობოტული მკლავების ერთ-ერთი მთავარი უპირატესობა მათი მოქნილობა და სისწრაფეა. ეს თვისებები რობოტული მკლავების საშუალებას აძლევს, მიაღწიონ ძნელად მისადგომ ადგილებს, რაც მათ პერსპექტიულს ხდის ისეთი გამოყენებისთვის, როგორიცაა ქირურგია. ისინი, როგორც წესი, დამზადებულია რბილი და მოქნილი მასალებისგან, მაგრამ არსებობს ხისტი ვერსიებიც. მაგალითად, ბრიტანელი ინჟინრების მიერ შემუშავებული მანიპულატორის სტრუქტურა შედგება 3D პრინტერით დაბეჭდილი „ხერხემლების“ მონაცვლეობითი ვერსიებისგან, რომლებიც ქმნიან სტრუქტურას, რომელსაც შეუძლია ორივე მიმართულებით მოხრა. თუმცა, ამ და ბევრ მსგავს რობოტურ მკლავს აქვს შეზღუდვა: მათ შეუძლიათ ეფექტურად იმუშაონ მხოლოდ მათთან ახლოს მდებარე კონკრეტულ ადგილას, რადგან არ შეუძლიათ სიგრძის შეცვლა.
იაპონიის კიუშუს უნივერსიტეტის მოტოჯი იამამოტოს ხელმძღვანელობით ინჟინრებმა შეიმუშავეს რობოტული მკლავის დიზაინი, რომელიც ამ ნაკლოვანებას აგვარებს. ისინი შთაგონებულნი იყვნენ კოდალას ენის უჩვეულო სტრუქტურით. მოქნილი, მობილური ჰიოიდური ძვალი გრძელია, რაც საშუალებას აძლევს მას თავის ქალას შემოეხვიოს და მასზე სრიალის გზით იმოძრაოს. ეს საშუალებას აძლევს ფრინველის ენას, ხის ქერქის ქვეშ საკვების ძიებისას, ნისკარტის სიგრძეზე სამჯერ გაიშალოს.

მანიპულატორი შედგება სამი ელექტროძრავიანი ძრავის მოდულისგან, რომელთა ლილვებზეც ჭიებია განლაგებული და მოქნილი საცეცისგან, რომელიც კონსტრუქციით ხერხემლის მსგავსია და შედგება თანაბრად განლაგებული „ხერხემლების“ - დისკების ნაკრებისგან, გარე ნაწილზე 120 გრადუსზე განლაგებული სამი ნახევარწრიული ჭრილით, რომლებშიც გადიან მოქნილი კბილანებიანი ღეროები.
საცეცი ძრავის მოდულის ცენტრალურ ხვრელშია განთავსებული ისე, რომ მართვის ელექტროძრავების ლილვებზე არსებული სამი ჭიაყელა გადაცემათა კოლოფი ეხებოდეს კბილანებიან ღეროებს და ქმნის თაროსებრ-პინიონურ ტრანსმისიას. როდესაც სამივე ძრავი ერთი და იგივე სიჩქარით ბრუნავს, საცეცი ძრავის მოდულში წინ ან უკან მოძრაობს. თუ მხოლოდ ერთი ძრავი ბრუნავს, მისი ბრუნვის მიმართულება იწვევს საცეცის გადახრას ერთი ან მეორე მიმართულებით ერთ-ერთ სიბრტყეში. სამივე თაროსებრ-პინიონური ტრანსმისიის გამოყენებით, მანიპულატორს შეუძლია სამივე მიმართულებით მოიხაროს.
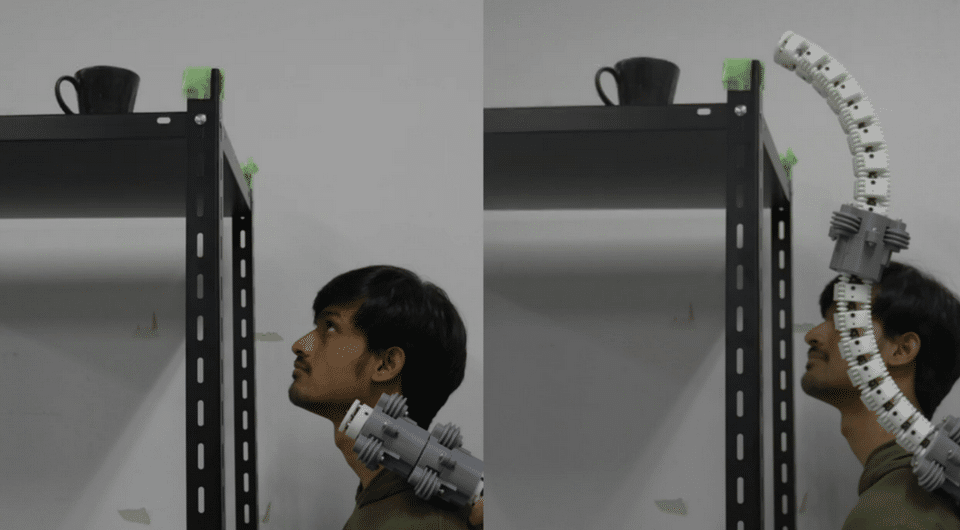
პროტოტიპს შეუძლია 450 მილიმეტრამდე გაიშალოს და მინიმუმ 125 მილიმეტრი რადიუსით მოიხაროს. ეს საშუალებას იძლევა, მაგალითად, კონტეინერში შეკუმშვისას საცეცის ლილვი კომპაქტურად დაკეცილი იყოს, რაც მინიმუმამდე ამცირებს მის სივრცეს. მანიპულატორის ღერძის გასწვრივ რამდენიმე წერტილში განლაგებული ინერციული საზომი ერთეულები (IMU) გამოიყენება მისი მიმდინარე პოზიციისა და ფორმის თვალყურის დევნებისთვის. ამ ერთეულებიდან მიღებული ინფორმაცია ასევე გამოიყენება მანიპულატორის ბოლოზე მოქმედი გარე ძალების მიმართულებისა და სიდიდის დასადგენად გაუსის პროცესის რეგრესიული ალგორითმის გამოყენებით.
ინჟინრების თქმით, სამომავლო სამუშაოს ერთ-ერთი მიმართულება იქნება რამდენიმე საავტომობილო მოდულის ერთ „ხერხემალზე“ გაერთიანება. ეს გაზრდის მანიპულატორის თავისუფლების ხარისხს უფრო მეტი მოხრის საშუალების მიცემით.
ზემოთ ნაჩვენებისგან განსხვავებით, ისრაელელი ინჟინრების მიერ შექმნილ MASR მანიპულატორს შიდა ნაწილის ნაცვლად გარეგანი აქვს, რომელიც მოძრავია. ის შედგება სამი ძრავით მოძრავი ბლოკისგან, რომლებიც მოძრაობენ მანიპულატორის პასიური რგოლების ერთობლიობის გასწვრივ, თითქოს რელსებზე, და თითოეულ რგოლს სასურველ კუთხეზე აბრუნებენ.


