Շանման ռոբոտները ռոբոտաշինության կարևոր ոլորտներից են, և Լոզանի Շվեյցարիայի դաշնային տեխնոլոգիական ինստիտուտի ինժեներներին հաջողվել է նոր հորիզոններ բացել: Նրանց փորձարարական ռոբոտը շարունակում է շարժվել վազքուղու վրա նույնիսկ անջատված շարժիչներով. այն պահանջում է միայն հակակշիռ:.
Նախագիծը մշակվել է կանադացի ռոբոտաշինության ուսանող Միքայել Աչկարի կողմից և հիմնված է իրական շների շարժման գրանցման տվյալների վրա: Օգտագործելով գլխավոր բաղադրիչների վերլուծությունը՝ տվյալները խմբավորվել են մի քանի վեկտորների մեջ, որոնք նկարագրում են շան շարժման հիմնական առանցքները, որոնք հիմք են հանդիսացել մեխանիզմի նախագծման համար:.
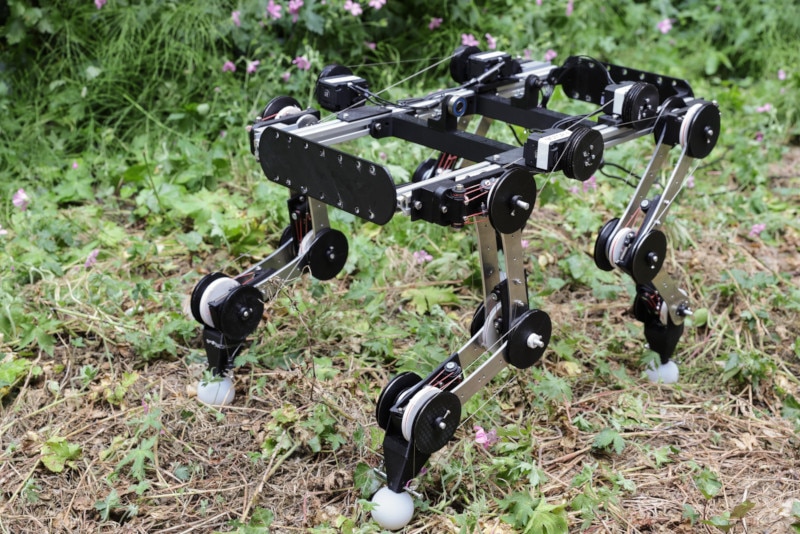
Ռոբոտի դիզայնը սիմետրիկ է իր երկայնական առանցքի նկատմամբ։ Նրա վերջույթների ոսկորները փոխարինված են մետաղական ձողերով, հոդերը՝ 3D տպիչով տպագրված պոլիմերային բլոկներով, իսկ ջլերը՝ բարակ պողպատե մալուխներով։ Մեքենայի չորս ոտքերից յուրաքանչյուրն ունի երեք հոդեր, ինչպես իրական շան ոտքերինը, և յուրաքանչյուրը մեխանիկորեն համընկնում է մյուսների հետ։.
Մեքենայի առաջին փորձարկման ժամանակ նախագծի մասնակիցներին անակնկալ էր սպասվում. ռոբոտի շարժիչները միացնելուց հետո այն շարունակում էր շարժվել ինքնուրույն՝ առանց որևէ շարժիչային աջակցության: Շարժումը պահպանելու համար անհրաժեշտ միակ բաղադրիչը վազքուղին էր: Ռոբոտը հագեցած է յուրաքանչյուր ոտքը սնուցող շարժիչներով, բայց այդ շարժիչները կարող են անջատվել:.
«Սկզբում մենք կարծեցինք, որ դա պատահականություն է։ Այսպիսով, մենք մի փոքր փոփոխեցինք դիզայնը և կրկին փորձարկեցինք ռոբոտը, և այն այլևս չէր կարողանում գործել», - բացատրեց նախագծի ստեղծողը։ Որպեսզի մեքենան շարժման մեջ մնա, նրա հետևի մասում ամրացվել էր ճոճանականման հակակշիռ՝ շարժումը ապահովելու համար։ Այն, անշուշտ, հավերժական շարժման մեքենա չէ. այն պահանջում է շարժիչ՝ ցատկելու և խոչընդոտները հաղթահարելու համար։.
«Մեր նպատակը բարձր տեխնոլոգիական շանման ռոբոտների հետ մրցակցելը չէ, այլ կենսաբանական նախատիպերի վրա հիմնված ռոբոտային նախագծերի ուսումնասիրությունը։ Սա ենթադրում է ռոբոտի հիմնարար դիզայնի կատարելագործում և դրա պասիվ հատկությունների փոփոխում, որպեսզի անհրաժեշտ լինեն միայն պարզ կառավարման համակարգեր՝ միաժամանակ առավելագույնի հասցնելով ռոբոտի հնարավորությունները։ Այն, ինչ մենք այստեղ արել ենք՝ համատեղ աշխատող հոդերի նախագծումը, արդեն ապացուցել է իր օգտակարությունը ռոբոտացված ձեռքեր և մարմնի այլ մասեր ստեղծելու համար», - եզրափակեց Միքայել Աշկարը։.