
Ճապոնիայից և Մեծ Բրիտանիայից ինժեներները մշակել են փոփոխական երկարությամբ ճկուն ռոբոտացված ձեռքի նախատիպ։ Օգտագործելով դարակաշարային և որդավոր մեխանիզմ, ռոբոտացված ձեռքը կարող է ձգվել մինչև առավելագույնը 450 միլիմետր երկարություն և ծռվել մինչև նվազագույնը 125 միլիմետր շառավղով։ Հոդվածը հրապարակվել է IEEE Robotics and Automation Letters-ում։.
Շոշափուկաձև ռոբոտացված ձեռքերի հիմնական առավելություններից մեկը դրանց ճկունությունն ու ճարպկությունն է: Այս հատկությունները թույլ են տալիս ռոբոտացված ձեռքերին հասնել դժվարամատչելի վայրեր, ինչը դրանք խոստումնալից է դարձնում այնպիսի կիրառությունների համար, ինչպիսին է վիրահատությունը: Դրանք սովորաբար պատրաստված են փափուկ և ճկուն նյութերից, բայց գոյություն ունեն նաև կոշտ տարբերակներ: Օրինակ, բրիտանացի ինժեներների կողմից մշակված մանիպուլյատորի կառուցվածքը բաղկացած է հերթագայող 3D տպիչով տպված «ողնաշարերից», որոնք կազմում են երկու ուղղություններով էլ ծռվելու ընդունակ կառուցվածք: Այնուամենայնիվ, սա և շատ նմանատիպ ռոբոտացված ձեռքեր ունեն մեկ սահմանափակում. դրանք կարող են արդյունավետորեն գործել միայն իրենց մոտ գտնվող որոշակի տարածքում՝ իրենց երկարությունը փոխելու անկարողության պատճառով:.
Ճապոնիայի Կյուսյու համալսարանի Մոտոջի Յամամոտոյի գլխավորած ինժեներները մշակել են ռոբոտացված ձեռքի դիզայն, որը հաղթահարում է այս թերությունը: Նրանք ոգեշնչվել են փայտփորիկի լեզվի անսովոր կառուցվածքով: ճկուն, շարժուն հիոիդ ոսկորը երկար է, ինչը թույլ է տալիս այն փաթաթվել գանգի շուրջը և շարժվել դրա երկայնքով սահելով: Սա թույլ է տալիս թռչնի լեզվին ծառի կեղևի տակ սնունդ փնտրելիս ձգվել իր կտուցի երկարությունից երեք անգամ ավելի երկար:.

Մանիպուլյատորը բաղկացած է երեք էլեկտրական շարժիչներով շարժիչային մոդուլից, որոնց առանցքների վրա տեղակայված են որդերը, և ճկուն շոշափուկից, որը կառուցվածքով նման է ողնաշարի, որը բաղկացած է հավասարաչափ տարածված «ողերի»՝ սկավառակների հավաքածուից, որոնց արտաքին մասում 120 աստիճանի անկյան տակ տեղակայված երեք կիսաշրջանաձև ակոսներով են անցնում ճկուն ատամնավոր ձողերը։.
Շոշափուկը տեղադրված է շարժիչային մոդուլի կենտրոնական անցքում այնպես, որ կառավարման էլեկտրական շարժիչների առանցքների վրա գտնվող երեք որդավոր ատամնանիվները միանան ատամնավոր ձողերին՝ կազմելով ատամնավոր-փինիոնային փոխանցման տուփ։ Երբ բոլոր երեք շարժիչները պտտվում են նույն արագությամբ, շոշափուկը շարժվում է առաջ կամ հետ շարժիչային մոդուլի միջով։ Եթե պտտվում է միայն մեկ շարժիչ, նրա պտտման ուղղությունը ստիպում է շոշափուկին շեղվել այս կամ այն ուղղությամբ հարթություններից մեկում։ Բոլոր երեք ատամնավոր-փինիոնային փոխանցման տուփերի միջոցով մանիպուլյատորը կարող է ծռվել բոլոր երեք ուղղություններով։.
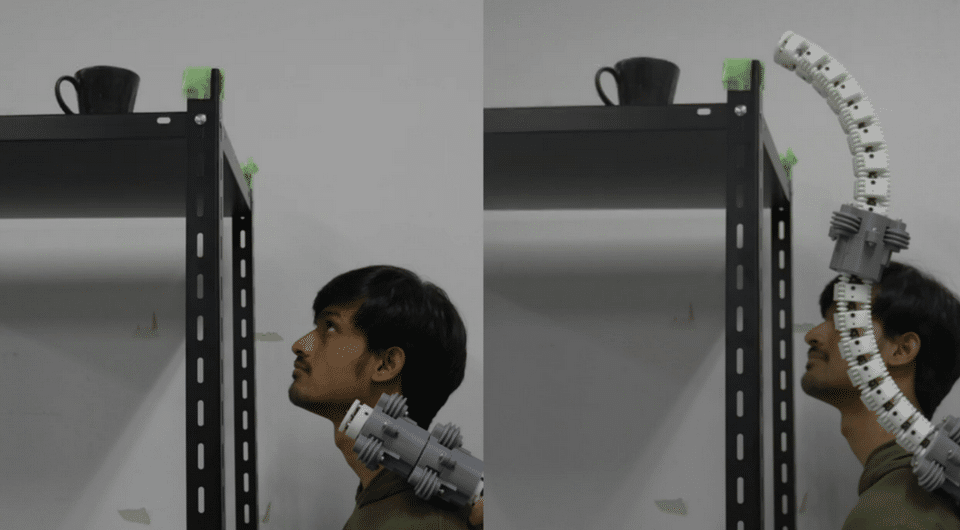
Նախատիպը կարող է ձգվել մինչև 450 միլիմետր և ծռվել առնվազն 125 միլիմետր շառավղով: Սա թույլ է տալիս, օրինակ, կոնտեյների մեջ քաշվելիս, շոշափուկի առանցքը կոմպակտ ծալել՝ նվազագույնի հասցնելով դրա տարածքի պահանջները: Մանիպուլյատորի առանցքի երկայնքով մի քանի կետերում տեղադրված իներցիոն չափման միավորները (IMU) օգտագործվում են դրա ընթացիկ դիրքը և ձևը հետևելու համար: Այս միավորներից ստացված տեղեկատվությունը նաև օգտագործվում է մանիպուլյատորի ծայրին ազդող արտաքին ուժերի ուղղությունը և մեծությունը որոշելու համար՝ օգտագործելով գաուսյան պրոցեսային ռեգրեսիայի ալգորիթմ:.
Ինժեներների խոսքով՝ ապագա աշխատանքի ուղղություններից մեկը կլինի մի քանի շարժիչային մոդուլների միավորումը մեկ «ողնաշարի» վրա։ Սա կբարձրացնի մանիպուլյատորի ազատության աստիճանները՝ թույլ տալով ավելի մեծ ծալում։.
Ի տարբերություն վերևում պատկերվածի, իսրայելցի ինժեներների կողմից ստեղծված MASR մանիպուլյատորն ունի արտաքին, այլ ոչ թե ներքին, շարժվող մաս։ Այն բաղկացած է շարժական բլոկից՝ երեք շարժիչներով, որոնք շարժվում են մանիպուլյատորի պասիվ օղակների մի շարքով, կարծես ռելսերի վրա լինեն, յուրաքանչյուր օղակը պտտեցնելով ցանկալի անկյան տակ։.


