
Մասաչուսեթսի տեխնոլոգիական ինստիտուտի ինժեներները ներկայացրել են թռչող միկրոռոբոտ, որը կարող է 11 վայրկյանում տասը ակրոբատիկ պտույտ կատարել և միջատներից ավելի արագ կտրուկ պտույտներ կատարել։ Սարքը համատեղում է ծայրահեղ մանևրելու ունակությունը, կոմպակտությունը և արագությունը, ինչը այն դարձնում է առաջին մեխանիզմը, որը սերտորեն ընդօրինակում է կենդանի էակների կենսամեխանիկան։
Հեղափոխություն թռիչքի կառավարման ոլորտում
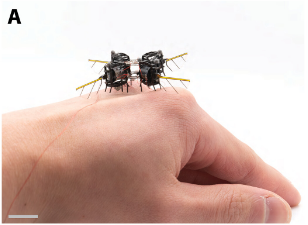
Հետազոտողները բացատրեցին, որ ռոբոտը չափսերով համեմատելի է միկրոկասետային ժապավենի հետ և կշռում է ավելի քիչ, քան թղթի սեղմակը։ Թևերը սնուցվում են փափուկ արհեստական մկանների շնորհիվ, որոնք հնարավորություն են տալիս կատարել արագ մանևրներ և կայծակնային արագացում։ Սակայն գլխավոր նվաճումը կառավարման համակարգն է։ Ինժեներները մշակել են երկմակարդակ արհեստական բանականության կառավարիչ։ Առաջին մակարդակն օգտագործում է մոդելային կանխատեսողական կառավարում, որը կարող է պլանավորել նույնիսկ ակրոբատիկ պտույտներ։ Երկրորդն օգտագործում է կոմպակտ նեյրոնային ցանց, որը կրկնօրինակում է բարդ պլանավորողի վարքագիծը, բայց գործում է իրական ժամանակում և գործնականում առանց հաշվողական ծախսերի։.

Արդյունքներ, որոնք գերազանցեցին էվոլյուցիան
Թիմի տվյալներով՝ նոր ռոբոտը թռչում է նախորդ տարբերակներից 4.5 անգամ ավելի արագ և արագանում է 2.5 անգամ ավելի արագ։ Փորձարկումների ժամանակ այն կատարել է տասը ակրոբատիկ պտույտ 11 վայրկյանում՝ շեղվելով իր հետագծից ոչ ավելի, քան հինգ սանտիմետրով, նույնիսկ քամոտ պայմաններում։ Այն նաև վերարտադրում է միջատների կողմից տեսողությունը կայունացնելու համար օգտագործվող կտրուկ «ցատկերը»։ Հաջորդ քայլը լիովին ինքնավար նավիգացիան է՝ տեսողական սենսորներով, ինչը թույլ է տալիս ռոբոտին գործել առանց արտաքին վերահսկողության։ Պրոֆեսոր Քևին Չենը նշել է, որ նախագծի նպատակն է ստեղծել սարքեր, որոնք կարող են ներթափանցել այնպիսի տարածքներ, որտեղ սովորական դրոնները չեն կարող։.


